赵行

图为机器狗的动态分析研究
我们在过去一年中开展了一系列的机器学习相关研究,包括多模态学习、自监督学习、多传感器学习等。
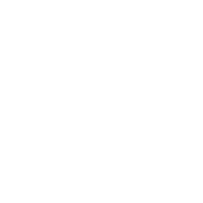
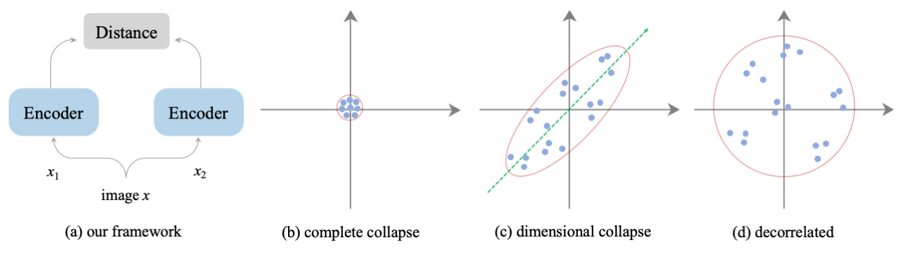
一个研究亮点是基于自监督学习的系列工作。在基础方面,我们深入分析了自监督学习中的坍缩现象,并且给出了一种基于去关联的方法来避免坍缩。在应用方面,我们将对比学习应用于语音风格转换,实现了比CycleGAN更好更稳定的语音转换效果;我们将对比学习应用于机器人的自监督学习,从而获得更好的表征。
图为自监督学习中的特征坍缩分析
图为语音风格转换
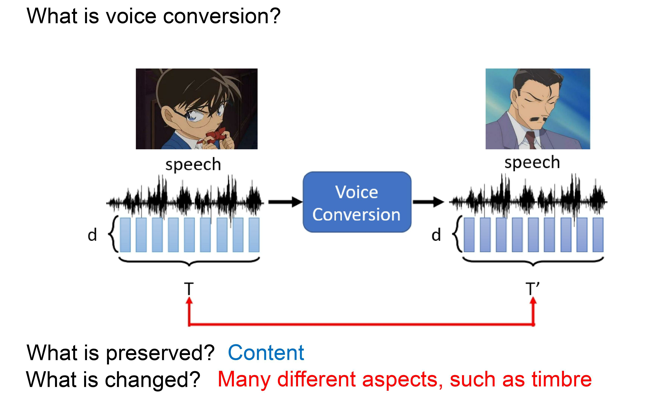
另一个研究重点是多模态学习,我们提出了一种基于知识蒸馏的多模态学习框架,利用大规模的无标签的多模态数据,实现“知识拓展”,提升模型的效果。该工作对当下热门的自监督学习、半监督学习等方向都有着重要的指导意义。
图为多模态知识拓展
基于多传感器学习的研究也已经陆续开展。一方面,我们正在开展用于自动驾驶的视觉-雷达多传感器融合模型的研究。另一方面,我们在实验室搭建了雷达实验台和声学实验台,进行了跨模态学习的物理实验。