
2024-06-21
Innovation Highlights
提出了一种基于RRAM-TCAM的新型存内搜索加速器,专为运动规划中的碰撞检测任务设计,以实现亚100μs的碰撞响应速度。加速器进一步刷新了现有方案的计算速度,和能耗,为机器人运动规划、制造和物理模拟等多种碰撞检测应用场景带来新的解决方案。Achievements Summary
基于八叉树编码的存内搜索碰撞检测—RTSA
运动规划是机器人运动导航的关键功能,其中,碰撞检测又是运动规划中极其耗时的部分,通常占据总计算时间的90%以上。现有的FPGA加速器在大型路线图的运动规划任务中难以保持计算的实时性。蒋力团队针对这一难题,提出了一种基于RRAM-TCAM的存内搜索硬件加速器 (RTSA)。它专为在运动规划中的碰撞检测任务设计,可实现亚100μs级的响应时间。
(1) 基于RRAM-TCAM的内存搜索碰撞检测加速器:RTSA结合了基于电阻式随机存取存储器 (RRAM) 密度高、功耗低的特点,以及三态内容可寻址存储器 (TCAM) 体积小、搜索速度快和能效高的特点,来实现碰撞检测逻辑。这种设计实现了大规模并行搜索操作,从而显著减少了数据在内存和计算单元之间的传输需求。
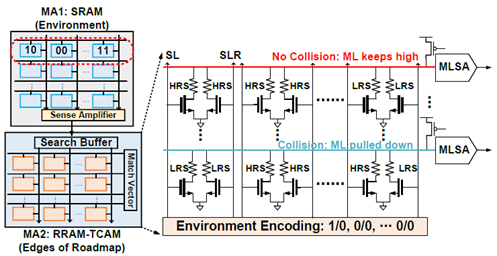
图1.TCAMs 工作流映射方案及配置
(2) 亚100μs级的碰撞检测响应时间:可以在800 MB规模的路线图中实现亚100μs的碰撞检测响应时间。该结构相比先前基于硬件的碰撞检测加速器实现了27-286倍的加速,相比基于CPU的碰撞检测加速了超过4,356倍。
(3) 八叉树编码和电路架构设计:对环境和路线图边缘使用两比特编码来表示三种不同的空间状态:占用、部分占用和空闲空间。设计中使用SRAM存储环境信息以便于频繁修改,同时使用RRAM-TCAM存储路线图边缘信息,这些边缘信息不需要频繁更新。这种设计不仅提高了碰撞检测的速度和能效,还减少了计算资源的占用。
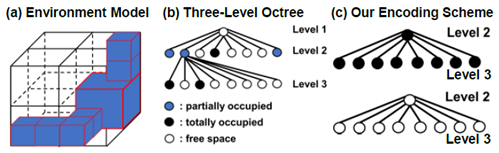
图2. 八叉树编码示意图
RTSA不仅提高了计算速度,还减少了能耗,为机器人运动规划、制造和物理模拟等多种应用提供快速且能效高的碰撞检测解决方案。相关成果收录于DATE 2024。
更多信息请阅读论文:
RTSA: An RRAM-TCAM based In-Memory-Search Accelerator for Sub-100 μs Collision Detection, Jiahao Sun, Fangxin Liu, Yijian Zhang, Li Jiang, and Rui Yang, DATE 2024.







