上海期智研究院PI,清华大学交叉信息研究院助理教授。
博士毕业于麻省理工学院计算机图形学实验室,主要研究方向为计算设计与物理仿真,研究工作结合物理仿真、机器学习、数值优化方法理解和设计动力系统,主要工作多次发表在计算机图形学领域顶级期刊和会议上,其中的代表性工作被WIRED和MIT News等多家知名科技媒体报道。
个人荣誉
NeurIPS优秀审稿人(2021,2022)
ICML优秀审稿人(2022)
计算设计:利用计算方法自动设计动力系统
物理仿真:结合第一性原理与机器学习的多物理系统仿真方法
成果4:学习控制自由形态的软体游泳者(2025年度)
杜韬团队提出了一种用于学习控制自由形态软体游泳者的自动化框架。该框架旨在解决传统方法依赖人工设计且难以泛化、以及物理仿真难以兼顾真实性与效率的核心挑战。框架通过结合形态无关的降维控制空间与高保真、GPU加速的流固耦合仿真器,实现了端到端的控制器学习。实验证明,该方法能为包括生物形态和抽象拓扑在内的多种游泳者自动生成高效、稳定的游泳策略,其性能在非常规形态上显著优于现有基线方法。
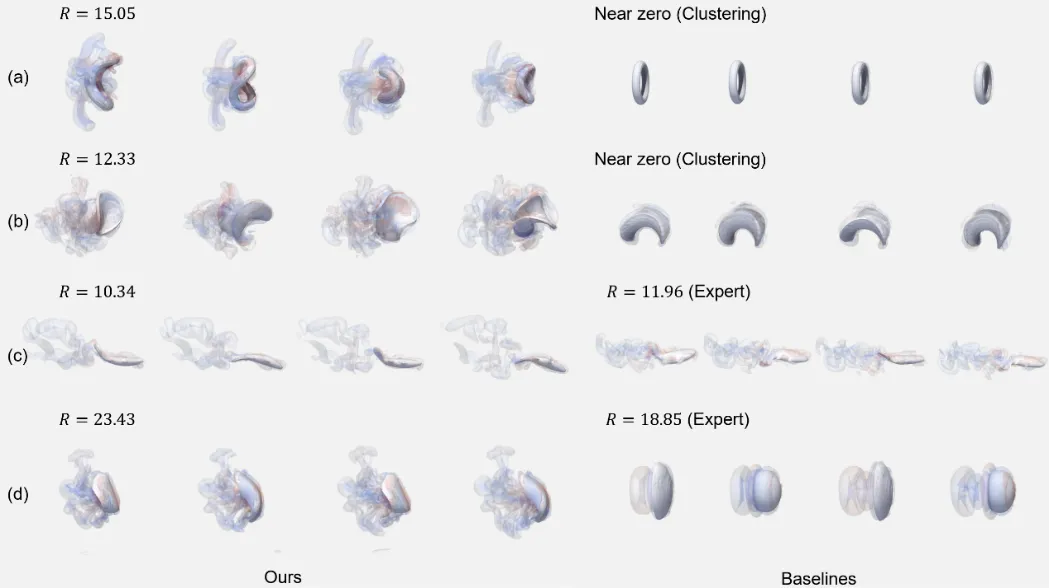
图. 学习到的游泳步态对比
论文信息:
https://changyu-hu.github.io/FreeFlow.github.io/
Learning to Control Free-Form Soft Swimmers, Changyu Hu, Yanke Qu, Qiuan Yang, Xiaoyu Xiong, Kui Wu, Wei Li, Tao Du†,NeurIPS 2025.
------------------------------------------------------------------------------------------------------------------------------
成果3:利用三维语义对应实现的基于单个示例的类别内泛化操作(2025年度)
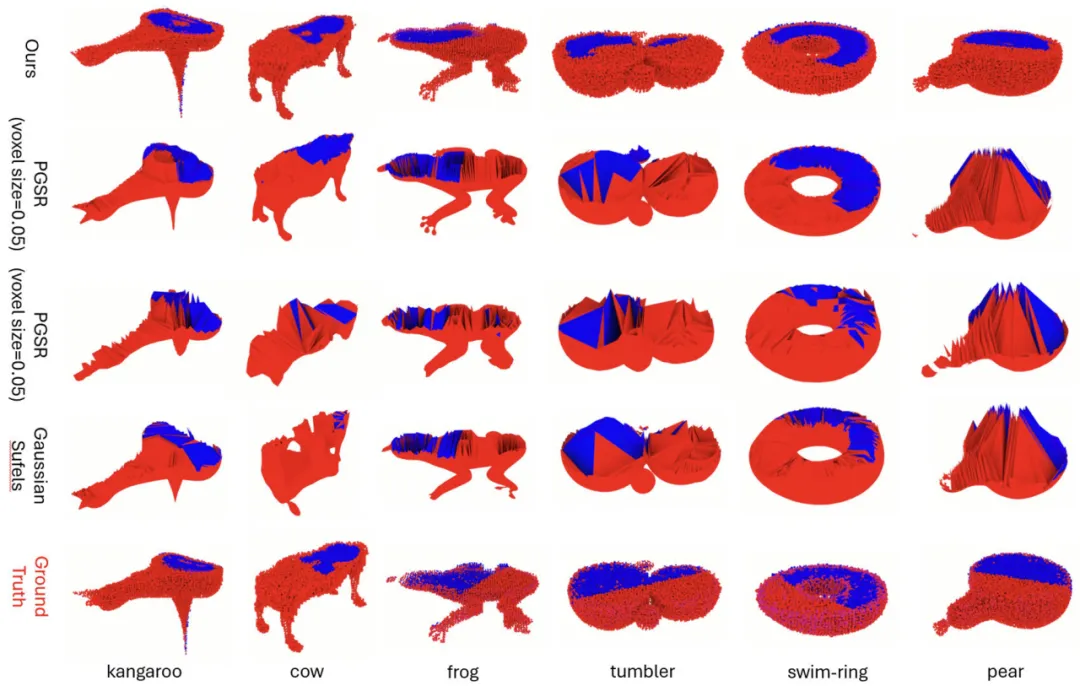
图. 团队的方法与基于网格的基线方法的对比
团队提出了TopoGaussian——一种基于粒子的整体化流程,能够仅通过易于获取的照片和视频作为输入,推断不透明物体的内部结构。传统基于网格的方法需要繁琐且易出错的网格填充与修复过程,且通常只能输出粗糙的边界表面。团队的方法在输入部分,给定一个物体的视频与多角度图像,利用高斯泼溅恢复出表面点云。然后,团队将该点云均匀填充成一个体点云,并为其赋予三种灵活的拓扑表示附加物理参数。接着,利用基于粒子的可微仿真器对体积点云进行模拟,将模拟运动与参考图像/视频中的运动对比,并将运动差异的梯度反向传播至拓扑表示。最后基于该梯度执行优化,获得与输入运动相匹配的内部结构。
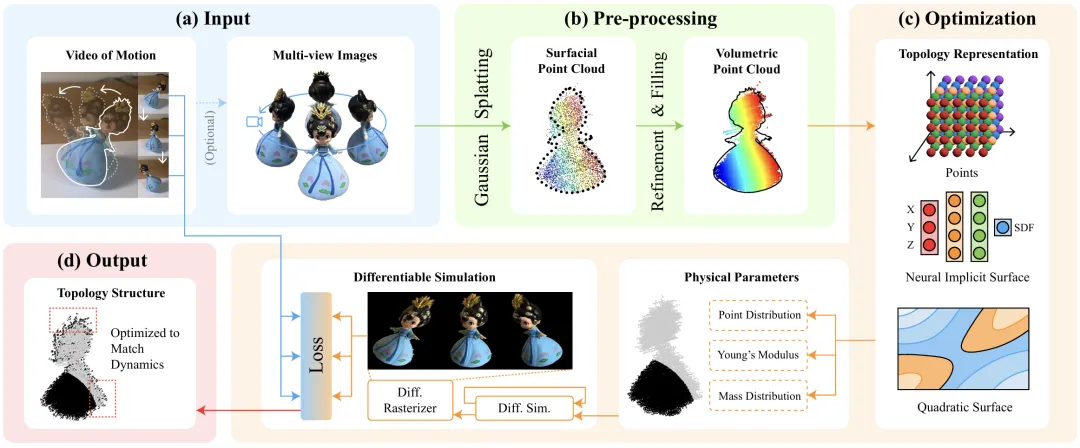
图. 流程概览
团队自行搭建了一个数据集,并设计了若干仿真环境下地任务和四个真实世界的任务来验证管线的有效性。就处理速度和重建质量(主要基于3D打印考量),与两个基于网格的基线—PGSR和 Gaussian Surfels进行对比。结果显示,团队的方法分别比 PGSR 的两个超参设定快 5.26 倍和 4.81 倍,比 Gaussian Surfels 快 1.28 倍;后者在两个例子中甚至无法输出视觉上正确的结果。与此同时,团队的拓扑重建质量分别提升了 2.33 倍、2.5 倍和 2.55 倍。团队还将其中一个结果 3D 打印,以验证实际制造的可行性。进一步的多组合成测试、四项真实世界验证及一系列消融实验均表明,该管线能在多种输入条件下稳定工作。
------------------------------------------------------------------------------------------------------------------------------
成果2:物理仿真中的深度学习方法(2024年度)
在全球人工智能驱动的科学研究(AI for Science)极速发展的背景下,人工智能技术与植物学、生态学等领域深度交叉融合,拓展着科学探索的边界。近期,杜韬团队基于人工智能与生物仿生技术,构建了一套能够自动进行翅果形态设计、飞行仿真、性能优化的计算仿生学流程,为人造翅果的形态和性能探索提供了新方案。
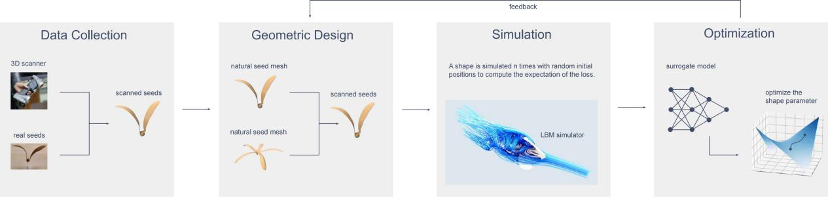
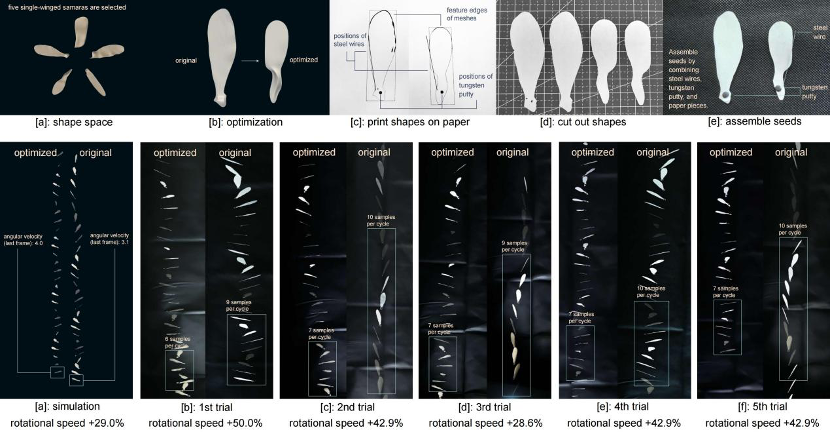
图1. 流程示意图
· 自动化翅果形态设计
若想借助AI自动设计种子的形态,核心挑战是如何让计算机理解种子的生成原理和路径。为解决这一问题,不仅需要高质量的数据集,更需要一套算法模型。团队首先构建了一个翅果种子数据集。团队利用清华大学基础工业训练中心提供的手持式三维扫描仪对每一颗翅果进行了三维数字重建,经过处理后形成了包含55枚种子三维样本的数据集。这些种子横跨14个物种,保证形态的多样性。在构建算法方面,团队借助对生物演化的观察,利用三维微分同胚群和测地坐标等数学工具对种子形状进行理解和生成。
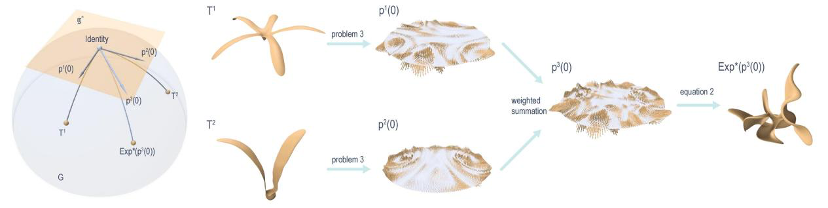
图2. 3D微分拓扑群上的测地坐标
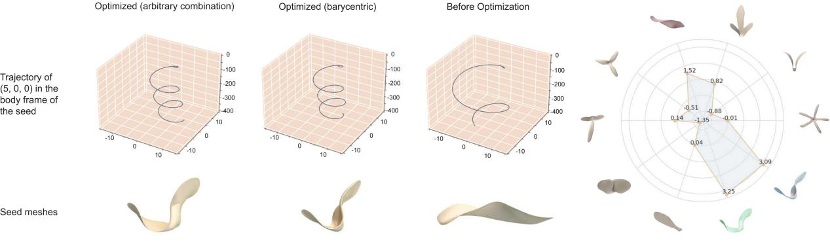
· 量化翅果飞行轨迹
计算翅果的飞行轨迹是优化人造翅果空气动力学性能的前提。团队选用格子玻尔兹曼方法(Lattice Boltzmann Method)流体力学数值模拟器,基于随体坐标系对翅果的行动轨迹进行建模计算。随体坐标系跟随翅果一起运动,将翅果始终放在流体计算域的中心,能够经济地计算翅果附近空气的运动。
· 优化空气动力学性能
借助AI优化人造翅果空气动力学性能可以抽象为一个寻找优化目标函数最优解的过程,然而,由于流体自身的混沌性,通过流体仿真计算得到的目标函数能量景观(energy landscape)极不光滑,包含大量局部最优解,优化难度很大。团队为了解决这个问题对目标函数进行的两种平滑处理:1. 借鉴了强化学习中利用概率分布描述系统初始状态的理念,来描述翅果的初始位姿并将目标函数的期望作为优化对象,更好地刻画了真实翅果从植物上脱落时位姿的随机性。2. 借鉴图形学领域最新的优化方案训练了一个神经网络模型,局部拟合了翅果的形态空间到目标函数空间的映射。拟合后神经网络的能量景观保留了目标函数的变化趋势,更加平滑。
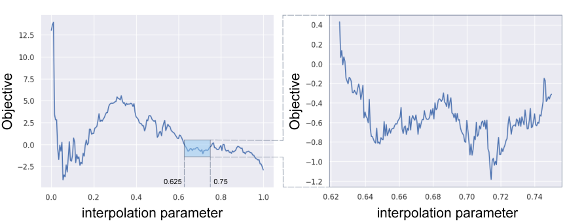
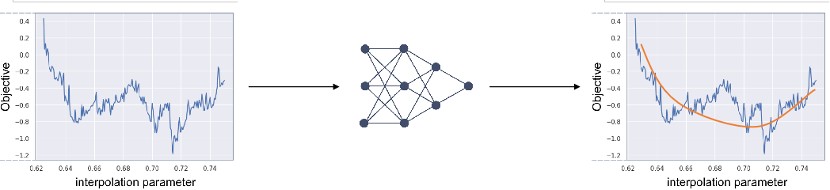
图4. 神经网络平滑近似后的优化函数能量景观
为检验方法的有效性,团队分别对比了自然翅果和优化后人造翅果在自旋速度、下落速度、飞行距离及飞行轨迹方面的表现。自旋速度对翅果传播有重要影响。旋起来的翅果像竹蜻蜓或螺旋桨,转速越高产生的升力越强,种子在空中停留的时间就越长,也就更有可能传播至更远的地方。团队不仅在仿真器中进行了转速实验,也使用常见材料制作了优化前后的翅果实物模型,检验它们在空气中的真实性能。在仿真实验中,优化后的翅果转速提升了约29%。而在五次空气中的飞行测试中,优化后的翅果转速提升了27.6%到50%。
下落速度和飞行距离同样影响翅果的传播效果,在两组特定场景的仿真实验中,人造翅果和天然翅果相比下落时间更长,飞行距离更远,潜在的传播范围更广。


图8.飞行距离仿真实验
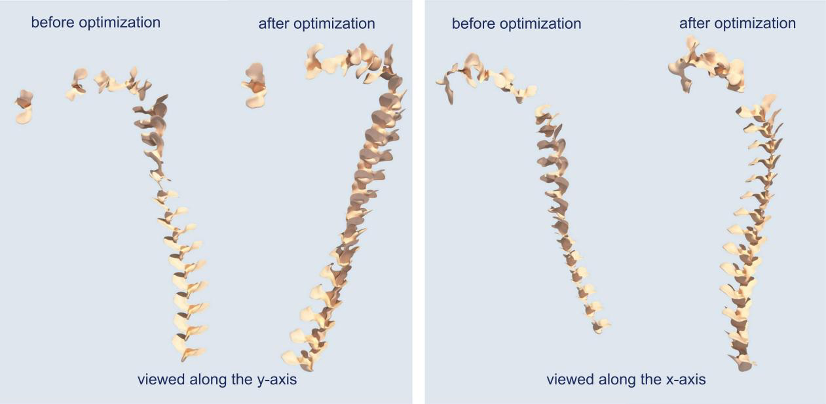
图9. “回旋镖”仿真实验
该论文将计算设计和仿生学完美融合,提供了一种极具创新性的仿生学研究途径。该论文提出的设计流程和方法,不仅能推动相关科学技术的发展,还有可能在机器人、农业、材料、航天等多个领域产生深远的社会和经济影响。
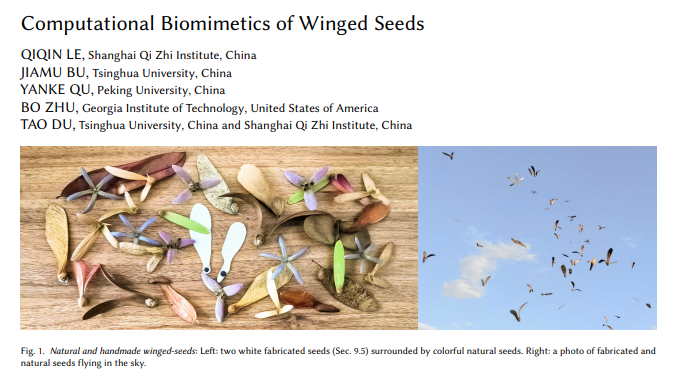
论文信息:Computational Biomimetics of Winged Seeds, Qiqin Le, Jiamu Bu, Yanke Qu, Bo Zhu, and Tao Du, https://people.iiis.tsinghua.edu.cn/~taodu/seed/le2024computational.pdf, ACM Trans. Graph. 43, 6, Article 180(2024).
------------------------------------------------------------------------------------------------------------------------------
成果1:物理仿真中的深度学习方法(2023年度)
快速、高精度的复杂多物理系统仿真在众多关键学科前沿有着重要应用。针对此类系统的传统数值算法(如有限元)存在计算量巨大、运行速度缓慢的缺陷。近年来兴起的一系列结合深度学习的物理仿真算法为创建快速物理仿真器提供了新思路,但往往缺乏传统数值方法所具备的正确性和可解释性。如何构建兼具速度和物理精确性的大规模多物理仿真器是一个尚未完全解决的问题,在这一方向的突破将为通用人工智能、虚拟现实、机器人等学科的重要应用带来新的契机。
我们在SIGGRAPH 2023会议上开设的《物理仿真中的深度学习方法》课程对物理仿真与深度学习的发展前沿进行了回顾与探讨。该课程讨论如何结合物理第一性、数值计算方法、以及现代深度学习模型构建新一代的物理仿真算法,并介绍研究组的相关成果:我们与麻省理工学院合作的 ICML 2023 论文观察到深度学习模型在物理仿真速度上的优势和精度上的缺陷,提出了利用图神经网络模型作为数值求解器预优矩阵的新思路,兼具传统数值方法的精确性和深度学习模型带来的速度优势。

研究领域:计算机图形学
项目网站:
https://dl.acm.org/doi/abs/10.1145/3587423.3595518
https://people.csail.mit.edu/yichenl/projects/preconditioner/
研究论文:
Deep Learning for Physics Simulation. Tao Du. SIGGRAPH 2023 Course
Learning Preconditioners for Conjugate Gradient PDE Solvers. Yichen Li, Peter Yichen Chen, Tao Du, Wojciech Matusik. ICML 2023. 查看PDF
7. Learning to Control Free-Form Soft Swimmers, Changyu Hu, Yanke Qu, Qiuan Yang, Xiaoyu Xiong, Kui Wu, Wei Li, Tao Du†,NeurIPS 2025.
6. Computational Biomimetics of Winged Seeds, Qiqin Le, Jiamu Bu, Yanke Qu, Bo Zhu, and Tao Du, https://people.iiis.tsinghua.edu.cn/~taodu/seed/le2024computational.pdf, ACM Trans. Graph. 43, 6, Article 180(2024)
5. Qiqin Le, Yitong Deng, Jiamu Bu, Bo Zhu, Tao Du, Second-Order Finite Elements for Deformable Surfaces, SIGGRAPH Asia (Technical Paper), 2023 查看PDF
4. Tao Du, Deep Learning for Physics Simulation, SIGGRAPH (Courses), 2023 查看PDF
3. Yichen Li, Peter Yichen Chen, Tao Du, Wojciech Matusik, Learning Preconditioners for Conjugate Gradient PDE Solvers, International Conference on Machine Learning (ICML), 2023 查看PDF
2. Pingchuan Ma, Peter Yichen Chen, Bolei Deng, Joshua B. Tenenbaum, Tao Du, Chuang Gan, Wojciech Matusik, Learning Neural Constitutive Laws from Motion Observations for Generalizable PDE Dynamics, International Conference on Machine Learning (ICML), 2023 查看PDF
1. Sizhe Li*, Zhiao Huang*, Tao Chen, Tao Du, Hao Su, Joshua B. Tenenbaum, Chuang Gan, DexDeform: Dexterous Deformable Object Manipulation with Human Demonstrations and Differentiable Physics, International Conference on Learning Representation (ICLR), 2023 查看PDF