
2024-07-24

近日,清华大学交叉信息研究院助理教授、上海期智研究院PI陈建宇团队与星动纪元合作完成的《进阶人形机器人运动控制:透过去噪世界模型学习掌握具有挑战性的地形》(Advancing Humanoid Locomotion: Mastering Challenging Terrains with Denoising World Model Learning(DWL))获得机器人领域难度最高的顶会Robotics: Science and Systems 2024年杰出论文奖入围(共三篇)。该会议于2024 年7 月15 日至19 日在荷兰代尔夫特理工大学举办,获得此项荣誉的论文比例不到投稿总数的1%。

颁奖典礼现场
现代环境设计以人类需求和能力为核心,人形机器人因其类似人类骨骼结构在移动性方面展现显著优势。传统步态控制技术如零力矩点(ZMP)、模型预测控制(MPC)和全身控制(WBC)取得了进展,但受限于环境动力学的精确建模。相对而言,强化学习(RL)对环境建模的需求较低,近期无模型RL的进展展示了创建普适性腿部运动控制器的潜力,使机器人能从多样环境中学习并适应,性能常超越传统模型控制方法。
为应对人形机器人控制的挑战,陈建宇团队提出去噪世界模型学习(DWL)技术,优化机器人在复杂地形中的能力。DWL已在小星(XBot-S)及小星max(XBot-L)上验证,全球首次实现端到端RL和零样本仿真到现实转换,使机器人在包括雪地倾斜面、楼梯等地形上稳定行走,抵抗外部干扰。DWL的成功归功于其创新的表示学习框架,通过去噪缩小仿真与现实的差距,并提出了主动2-自由度踝关节(闭环运动链踝机制)的控制方法,显著增强了机器人的鲁棒性。
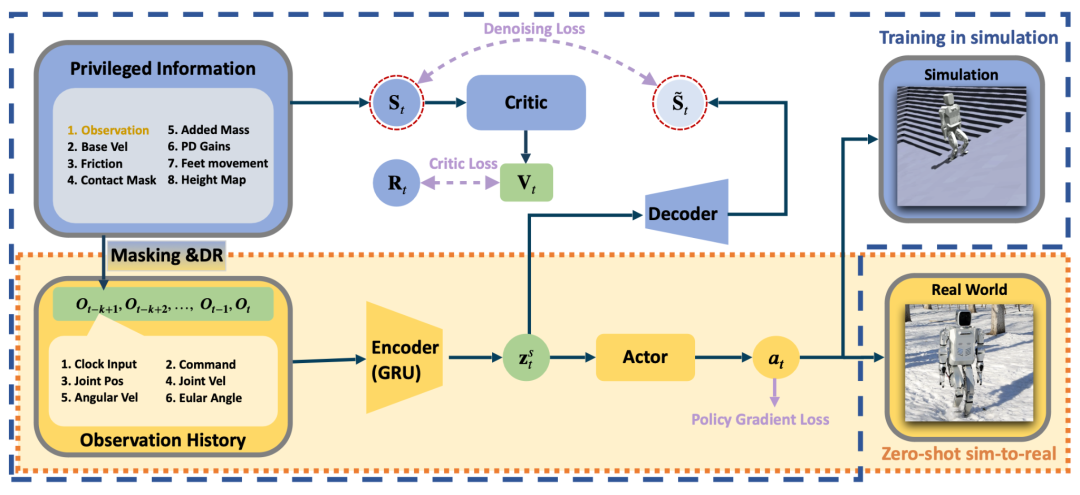
DWL算法过程
此项工作由陈建宇团队与星动纪元合作完成。本论文共同第一作者为星动纪元的工程师谷心洋,上海期智研究院实习生、清华大学交叉信息研究院硕士生王彦仁、博士生朱翔,清华大学交叉信息研究院博士生施铖铭。
会议演讲,右起王彦仁、谷心洋
论文链接:https://roboticsconference.org/program/papers/58/









