
2024-05-09

许华哲团队在机器人学习与操作研究中取得重要进展,在ICRA 2024上发表2项成果。运用强化学习算法实现通用分布式操作的系统ArrayBot,通过触觉传感器进行操作学习,可用于真实世界的多种操作任务,展示了在模拟环境训练后无需领域随机化即可迁移至真实机器人的能力。提出了一种新型的手对手模仿学习可穿戴灵巧手HIRO Hand,它结合了专家数据收集和灵巧操作的实现,使操作者能够利用自己的触觉反馈来确定适当的力量、位置和动作,以执行更复杂的任务。
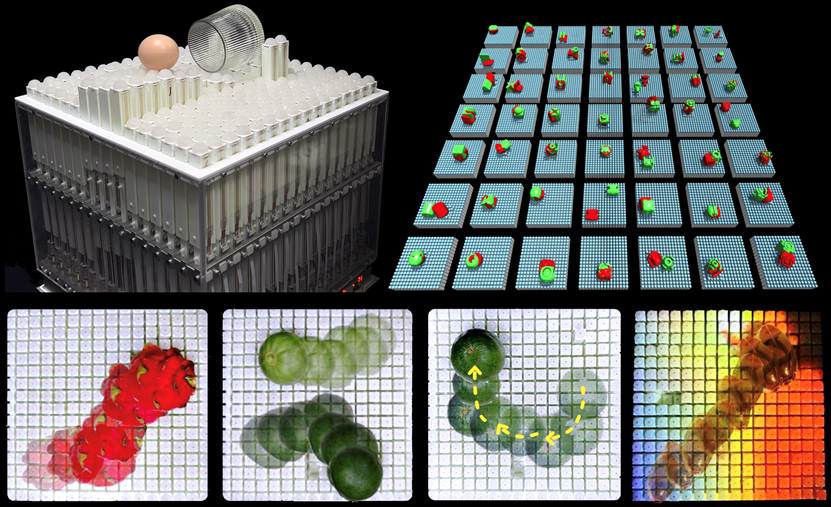
论文题目:ArrayBot: Reinforcement Learning for Generalizable Distributed Manipulation through Touch
论文作者:Zhengrong Xue*, Han Zhang*, Jingwen Cheng, Zhengmao He, Yuanchen Ju, Changyi Lin, Gu Zhang, Huazhe Xu
项目链接:https://steven-xzr.github.io/ArrayBot/
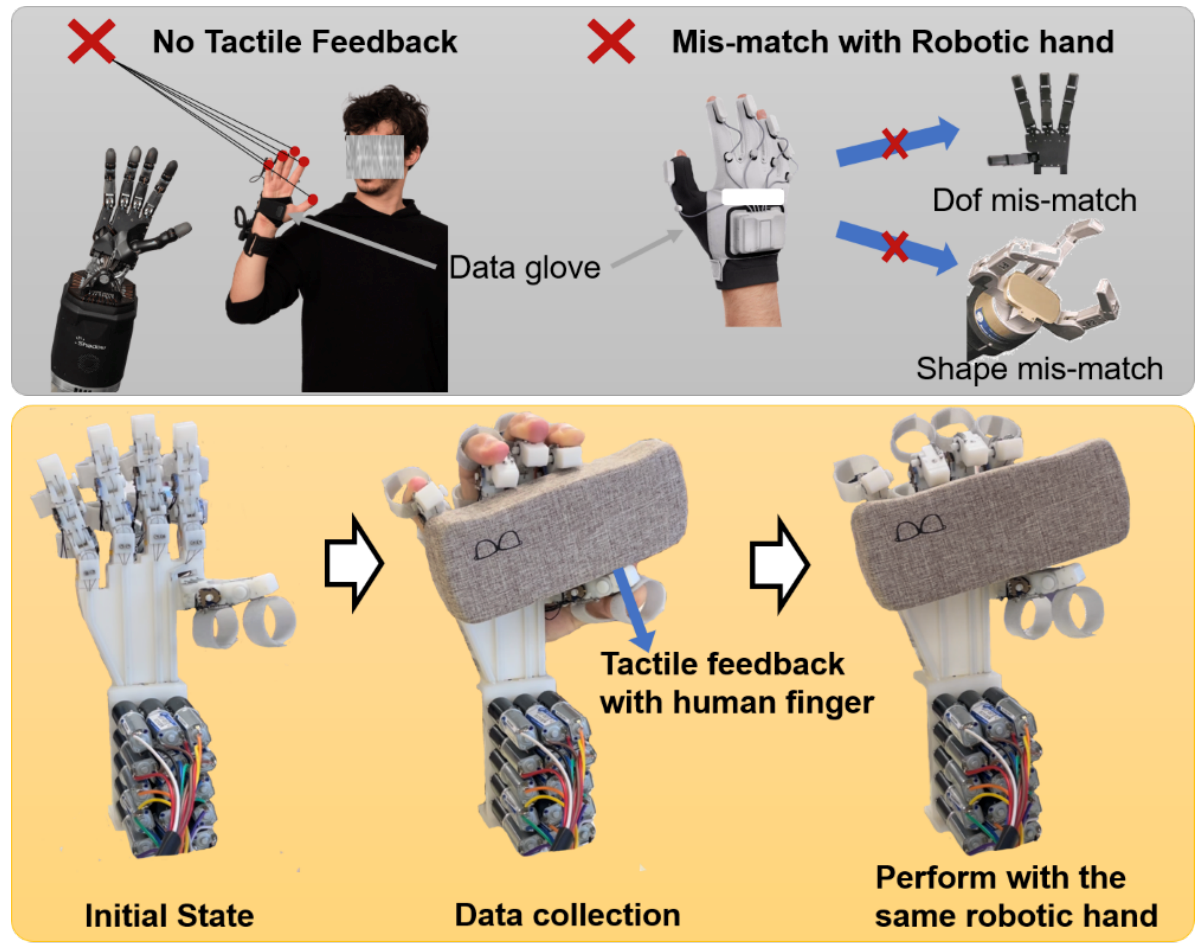
论文题目:A Wearable Robotic Hand for Hand-over-Hand Imitation Learning
论文作者:Dehao Wei, Huazhe Xu
项目链接:https://sites.google.com/view/hiro-hand







