
2024-05-09

人形机器人的全身控制是一个具有挑战性的课题。陈建宇团队提出一种去中心化的复杂机器人控制算法DEMOS,在不牺牲任务性能的前提下,鼓励机器人在强化学习过程中自主发现可以解耦合的模块,同时保留必要合作模块之间的连接。该算法为机器人的设计和开发提供了新的视角,特别是在需要高度自主性和适应性的领域,如搜索和救援、探索和工业自动化。
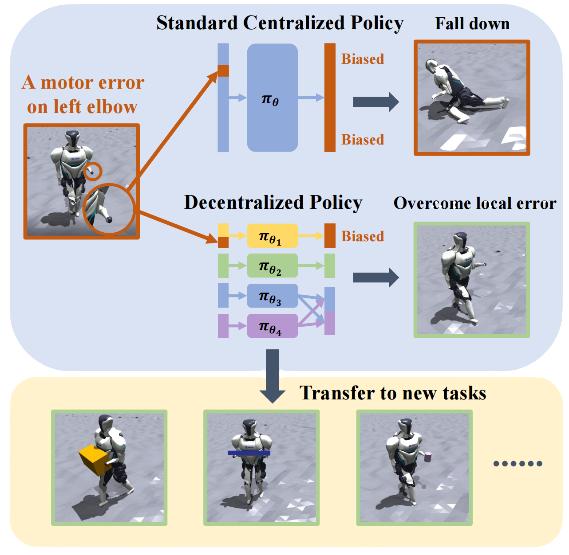
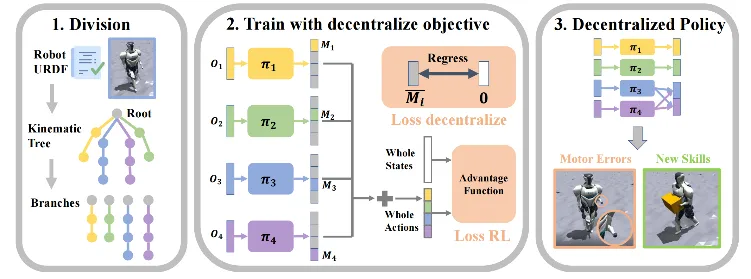
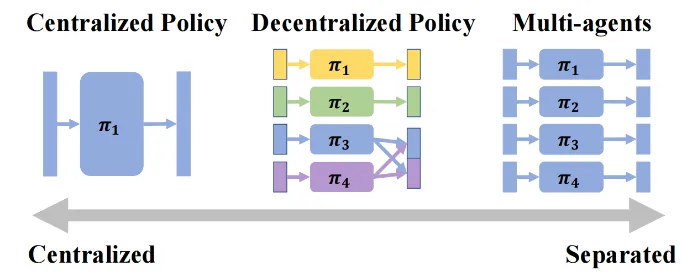
强化学习在足式机器人控制上取得了重大的成功,但是强化学习得到的策略往往是中心化的特异性策略,该策略对局部错误不鲁棒,并且难以迁移到新任务中。陈建宇课题组提出一种去中心化的复杂机器人控制算法DEMOS (Decentralized motor skill),在不牺牲任务性能的前提下,鼓励机器人在强化学习过程中自主发现可以解耦合的模块,同时保留必要合作模块之间的连接。
DEMOS策略在提高机器人系统的鲁棒性、泛化能力和多任务学习方面具有显著的优点,具体包括:
对局部错误更加鲁棒,可以克服局部电机故障带来的影响,并且能够更好地泛化到新任务。
可以通过组合、微调的方式快速学习新的技能。该方法在四足机器人,机械臂+四足机器人,人型机器人等复杂机器人系统上都展现了优越的性能。
该算法为机器人的设计和开发提供了新的视角,特别是在需要高度自主性和适应性的领域,如搜索和救援、探索和工业自动化。
论文题目:Decentralized Motor Skill Learning for Complex Robotic Systems
论文作者:Yanjiang Guo, Zheyuan Jiang, Yen-Jen Wang, Jingyue Gao, Jianyu Chen
论文链接:https://arxiv.org/pdf/2306.17411










