
2024-05-09

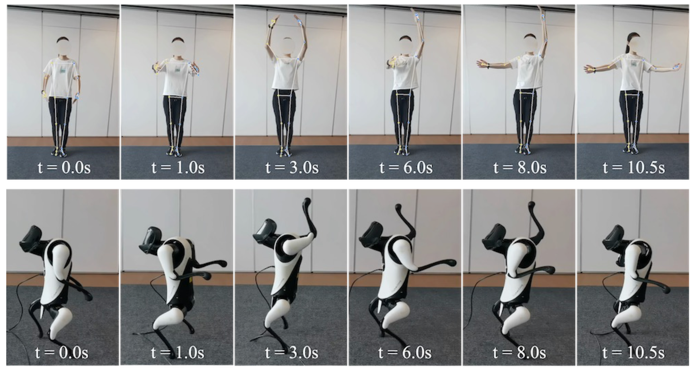
吴翼团队在四足机器人执行类人双足运动研究中取得重要进展,在ICRA 2024上发表2项成果。提出了一个分层框架,能够响应人类视频或自然语言指令,实现模仿拳击、芭蕾舞等动作,并与人类进行物理互动。提出了LAGOON系统,它使用预训练模型生成人类动作,然后通过强化学习在模拟环境中训练控制策略,以模仿生成的人类动作,并通过领域随机化将学习到的策略部署到真实世界的四足机器人上,实现了如“后空翻”、“踢球”等复杂行为。
论文题目:Learning Agile Bipedal Motions on a Quadrupedal Robot
论文作者:Yunfei Li, Jinhan Li, Wei Fu, Yi Wu
项目链接:https://sites.google.com/view/bipedal-motions-quadruped/
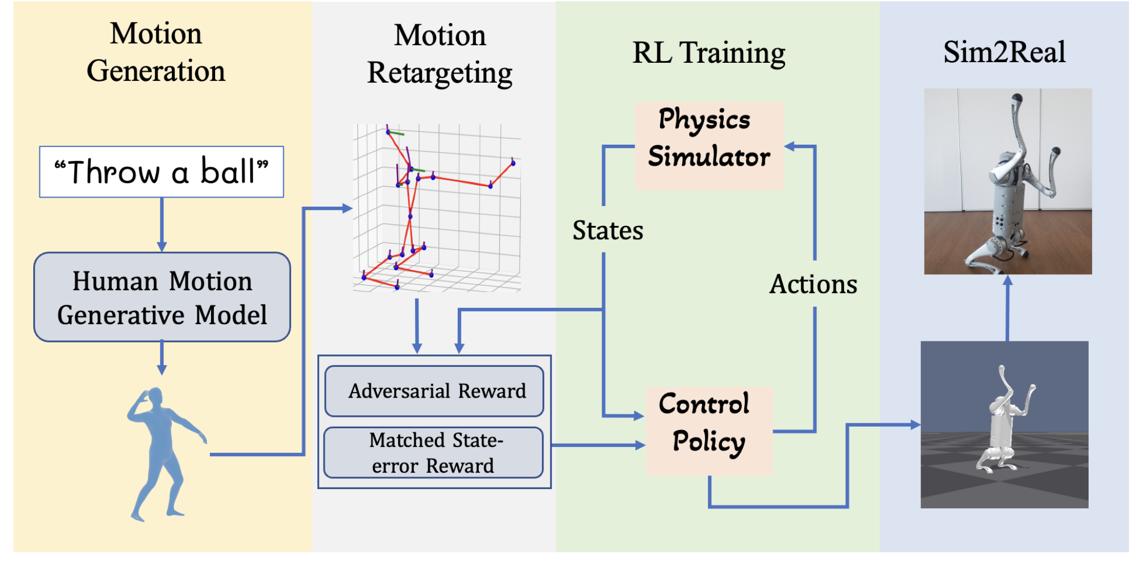
论文题目:Language-Guided Generation of Physically Realistic Robot Motion and Control
论文作者:Shusheng Xu, Huaijie Wang, Jiaxuan Gao, Yutao Ouyang, Chao Yu, Yi Wu










