
(3)(2)(2)(4)-450.jpg)
上海期智研究院PI、清华大学助理教授张焕晨团队聚焦高效的数据压缩和索引技术研究,旨在消耗更少的内存和存储空间的同时,提高系统查询数据的性能,为AI和大数据应用提供坚实的数据存储底座。近期,团队首次在数
张焕晨 成果收录于ACM SIGMOD 2024
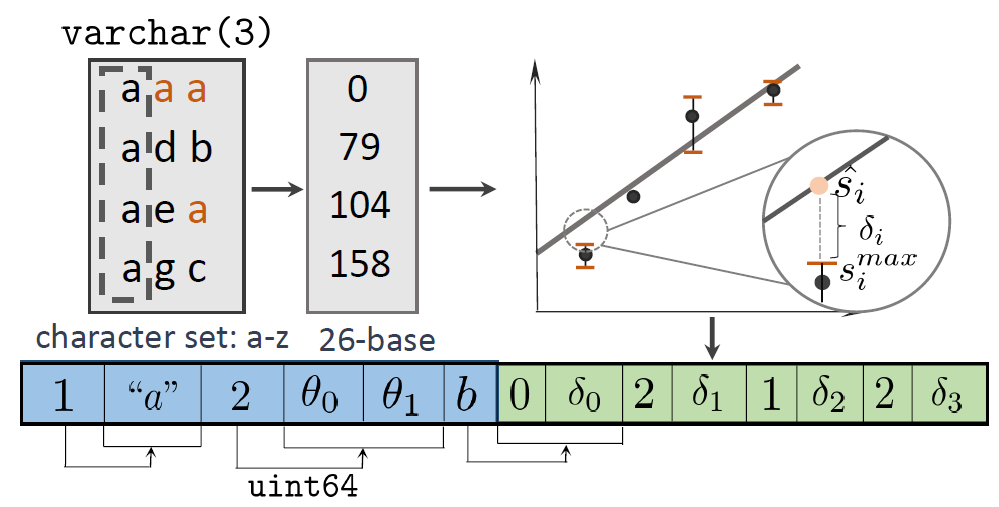
上海期智研究院PI、清华大学助理教授张焕晨团队团队首次在数据库中提出了Learned Compression (LeCo)数据压缩框架。
张焕晨 成果收录于ACM SIGMOD 2024
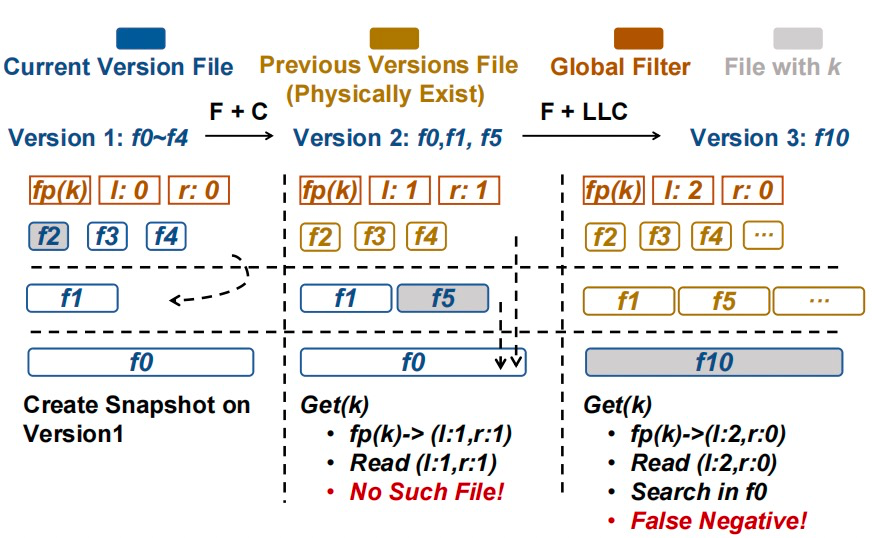
上海期智研究院PI、清华大学助理教授张焕晨团队提出了一种全局范围过滤器结构Global Range Filter (GRF)来减少查询过滤器的时间开销。在不产生额外内存开销的情况下将全局过滤器支持了范围查询,通过形状编码来保证查询结果在并发场景下的正确性。
张焕晨 成果收录于ACM SIGMOD 2024
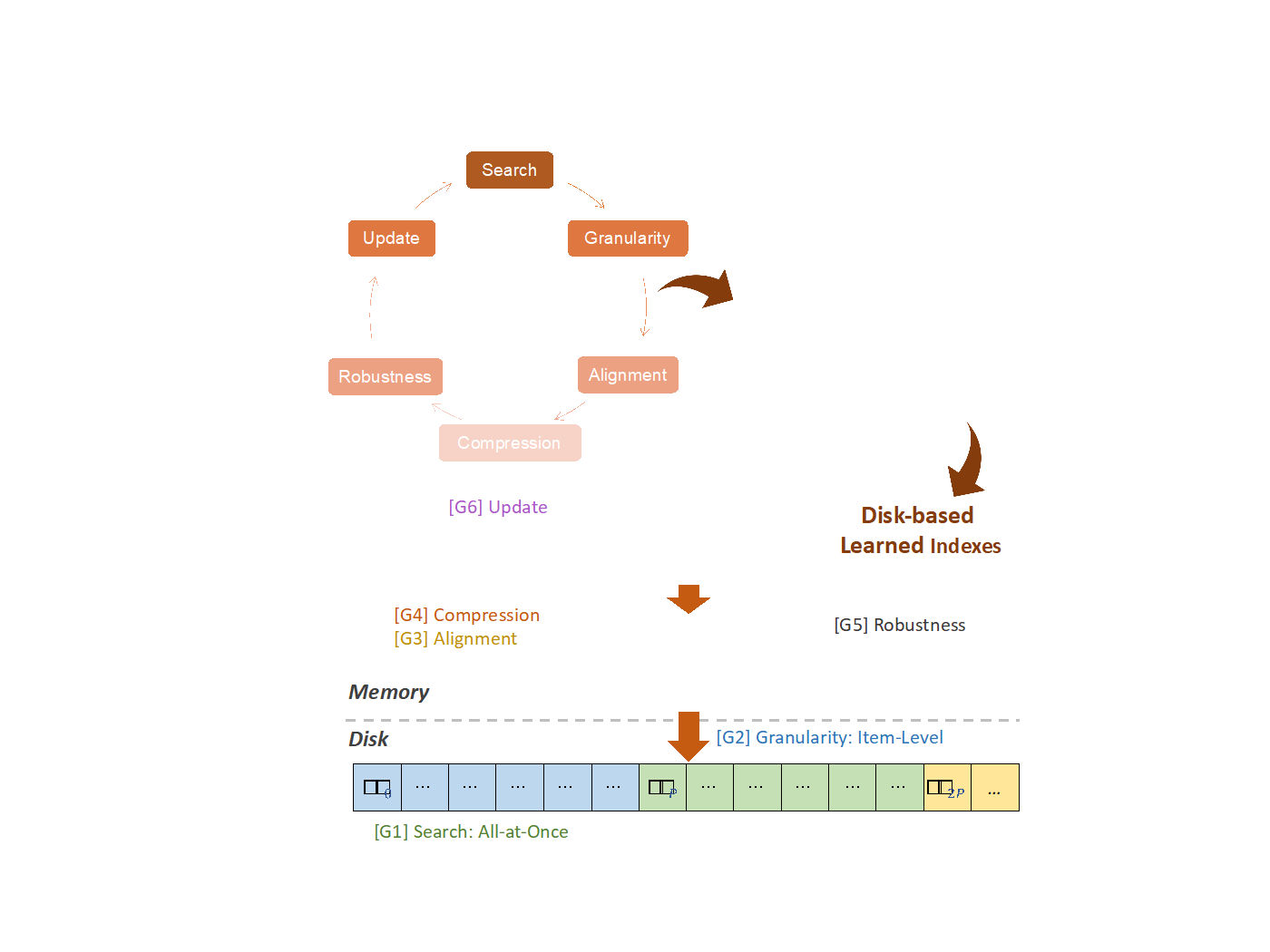
上海期智研究院PI、清华大学助理教授张焕晨团队提出了一套通用的转换和优化准则 (SGACRU),并将其应用于现有的内存型学习型索引。这一通用转换方法能够有效将内存中的学习型索引转化为适用于磁盘场景的索引,同时获得比之前更快的查询速度和更少的内存占用。
(3)(2)(2)(4).jpg)
上海期智研究院PI、清华大学助理教授房智轩团队近期在网络系统在线学习与最优决策方面,取得重要进展。团队基于带约束的在线学习方法,设计了一系列算法,使得缺乏先验知识的决策者可以在满足应用需求与资源约束的
房智轩 成果收录于ACM SIGMETRICS 2024
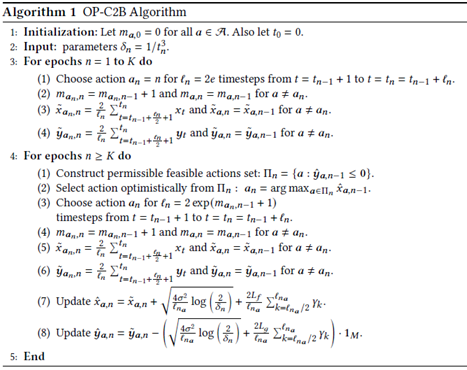
研究了具有收敛动力学的演化系统最优控制,使决策者在缺乏系统稳态反馈先验知识的情况下,能通过使用设计的“乐观-悲观收敛和置信界限算法 (OP-C2B)”,缩减学习与等待的时间,在带有期望约束的在线控制问题中同时实现亚线性的遗憾值和约束违背。该成果对设计和分析用于控制收敛动态系统的算法具有重要价值。
房智轩 成果收录于INFOCOM 2024
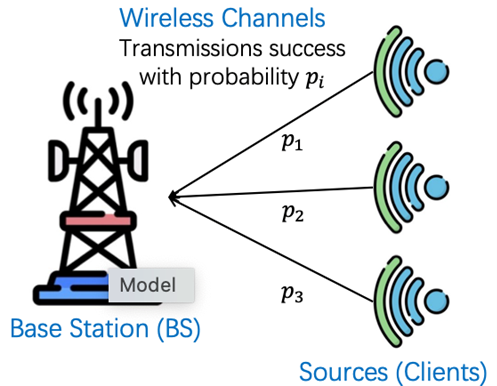
房智轩团队针对物联网环境中广泛存在的信息收集调度问题,提出了一种高效的在线调度策略,能够在未知信息价值和信道条件下实现高效的信息收集。在无线网络系统中,多个传感器或信息源持续收集信息并将数据传输给监视器。这一过程中,监视器面临两个主要挑战:一是不同信息源的数据对监视器的价值不同,但监视器对这些数据价值的先验统计知识是未知的;二是无线通信带宽有限且不稳定,信息源与监视器之间的无线信道可靠性(如丢包率)也是未知的。 为了解决监视器缺乏信息源数据价值的先验知识和无线信道不稳定

房智轩 成果收录于AAAI 2024、ICML 2024
研究了具有收敛动力学的演化系统最优控制,使决策者在缺乏系统稳态反馈先验知识的情况下,能通过使用设计的“乐观-悲观收敛和置信界限算法 (OP-C2B)”,缩减学习与等待的时间,在带有期望约束的在线控制问题中同时实现亚线性的遗憾值和约束违背。该成果对设计和分析用于控制收敛动态系统的算法具有重要价值。
弋力 成果收录于CVPR 2024
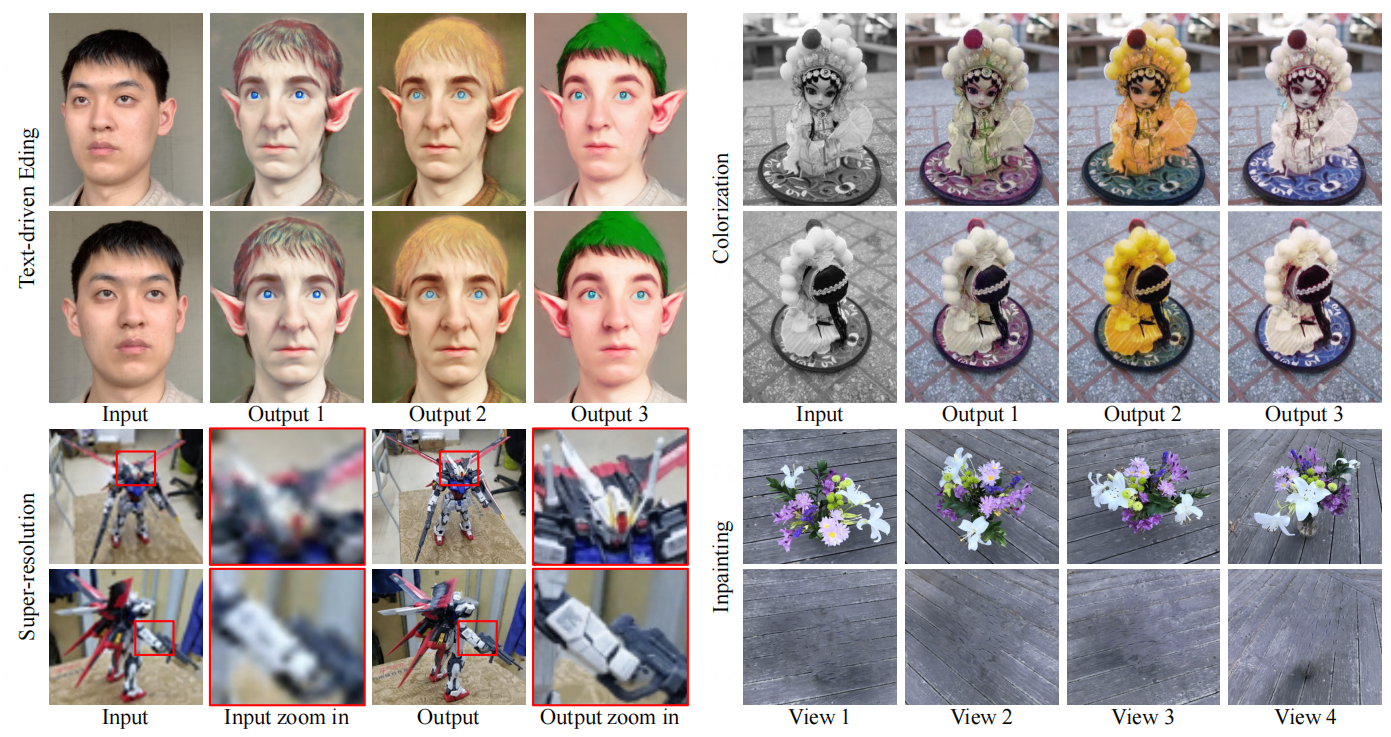
此外,弋力团队与香港科技大学谭平教授团队合作研究的关于通用NeRF编辑的成果也发表于CVPR 2024。
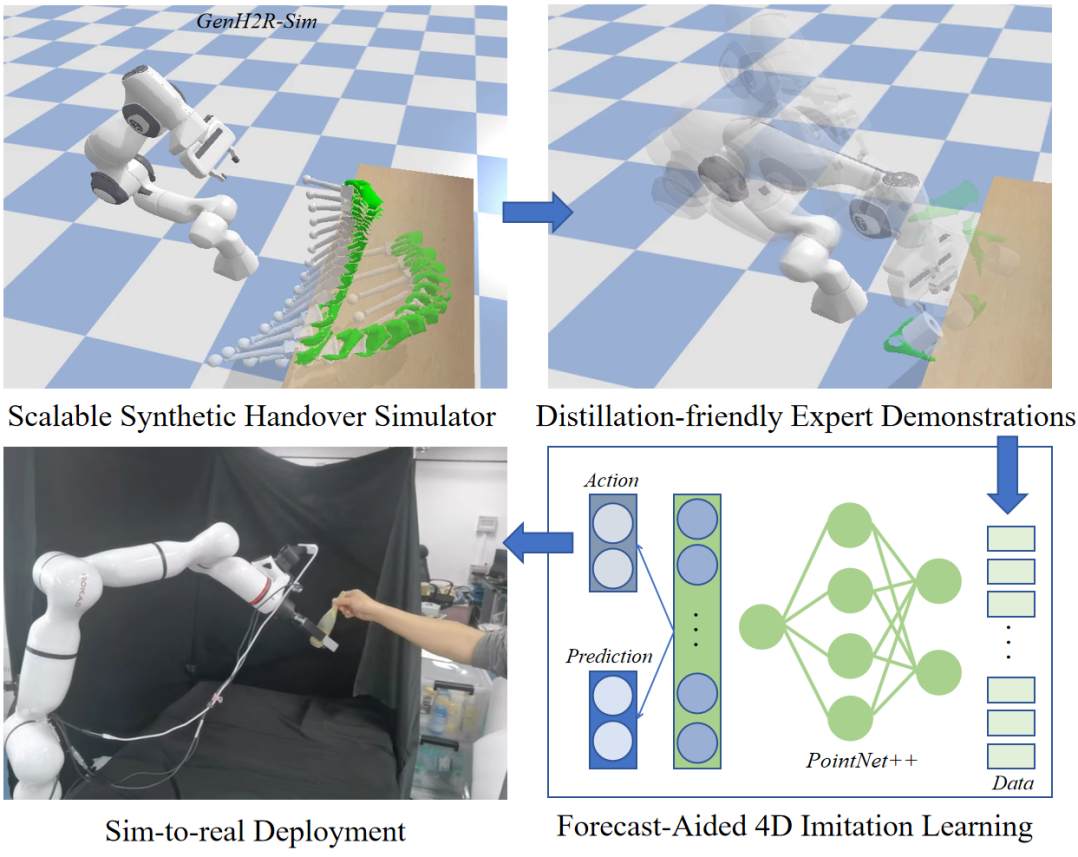
弋力 成果收录于CVPR 2024
弋力团队近期在手物交互的理解与生成方面取得了卓越的研究成果。团队紧密围绕手物交互的不同层面展开,从数据集构建到去噪方法,再到通用人机交接技能的学习,形成了一个完整的研究链条。不仅拓展了现有的研究范围,更为虚拟现实、机器人操作和人机协作等领域研究提供了新思路。相关3项成果收录在今年的计算机视觉领域的顶级学术会议之一Conference on Computer Vision and Pattern Recognition(CVPR 2024,录用率为23.6%)。

近期,上海期智研究院信息安全方向的郁昱、陈一镭、高鸣宇、宋一凡四位PI科学家团队在信息安全和密码学国际顶会Eurocrypt (European Cryptology Conference)、STOC
郁昱 成果发表于Eurocrypt 2024
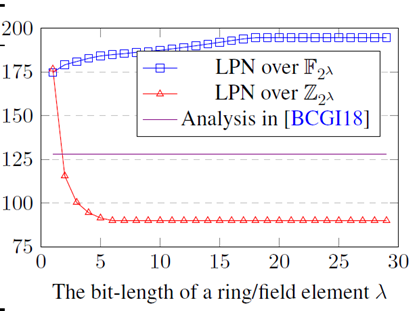
郁昱 上海期智研究院PI、上海交通大学教授 LPN问题已在密码学中得到广泛应用,最近被用于设计PCG类相关随机数生成协议,进而被应用在安全多方计算、零知识证明和私有集合交集等密码协议中。郁昱团队系统研究了PCG应用中LPN问题的困难性,获得了以下三方面的研究成果

宋一凡 成果收录于Eurocrypt 2024
对于一类泄露函数L,可容忍泄露的隐私电路要求对于电路内部的任意L范围内的信息泄露可以规约到对于输入和输出的L范围内的信息泄露。可容忍泄露的隐私数据可以被用来设计安全硬件以防范侧信道攻击并提供理论基础。宋一凡团队给出了首个针对计算深度1的全局泄露函数类的可容忍泄露隐私电路的构造,同时团队给出了从无状态隐私电路到有状态隐私电路的一般性构造。
陈一镭 STOC 2024
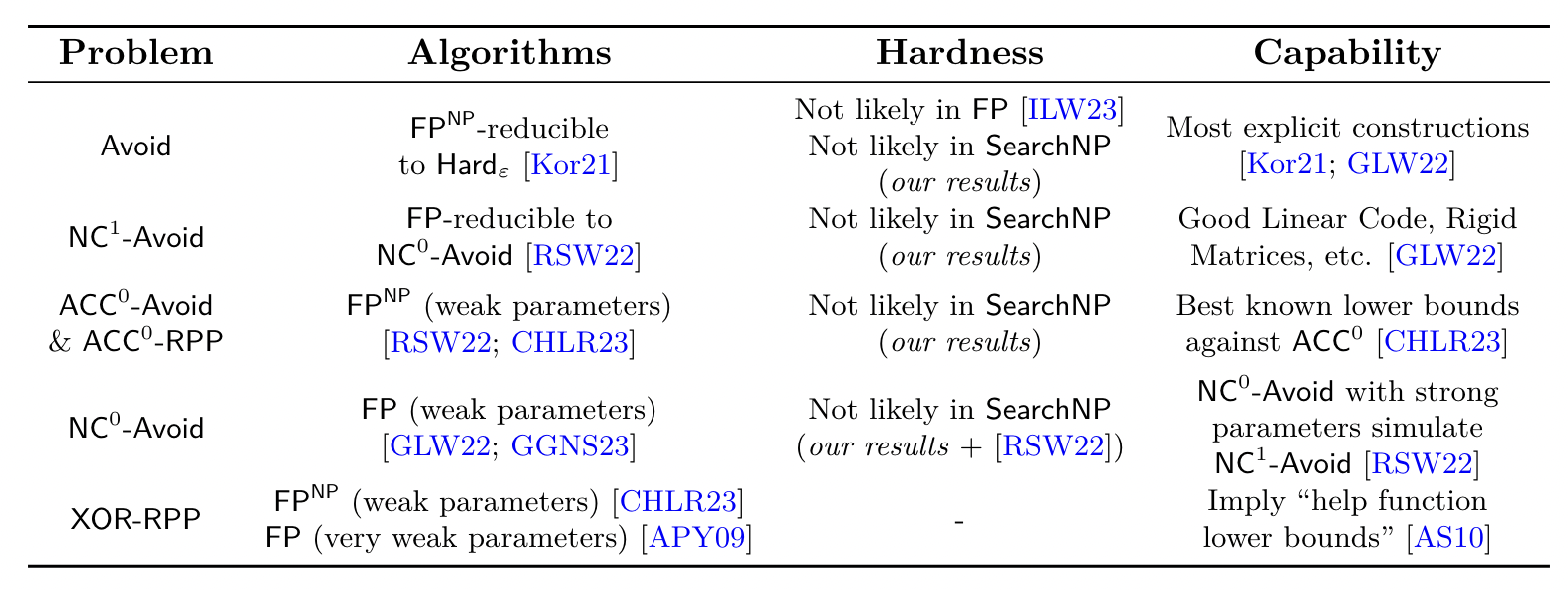
陈一镭 上海期智研究院PI、清华大学助理教授 最近在理论计算机领域对于显示构造问题的研究中,引入了一种系统性的方法,通过使用元问题(meta problems)来探索显式构造问题的复杂性,即值域规避问题(缩写为Avoid)和远点问题(缩写为RPP)。这些元问题的上限和下限为之前独立研究的特定显式构造问题的复杂性提供了统一的视角。以前的工作很大程度上未解决的一个有趣问题是:Avoid和RPP 对于简单电路(例如低深度电路)是否困难。
郁昱 成果收录于IEEE S&P 2024
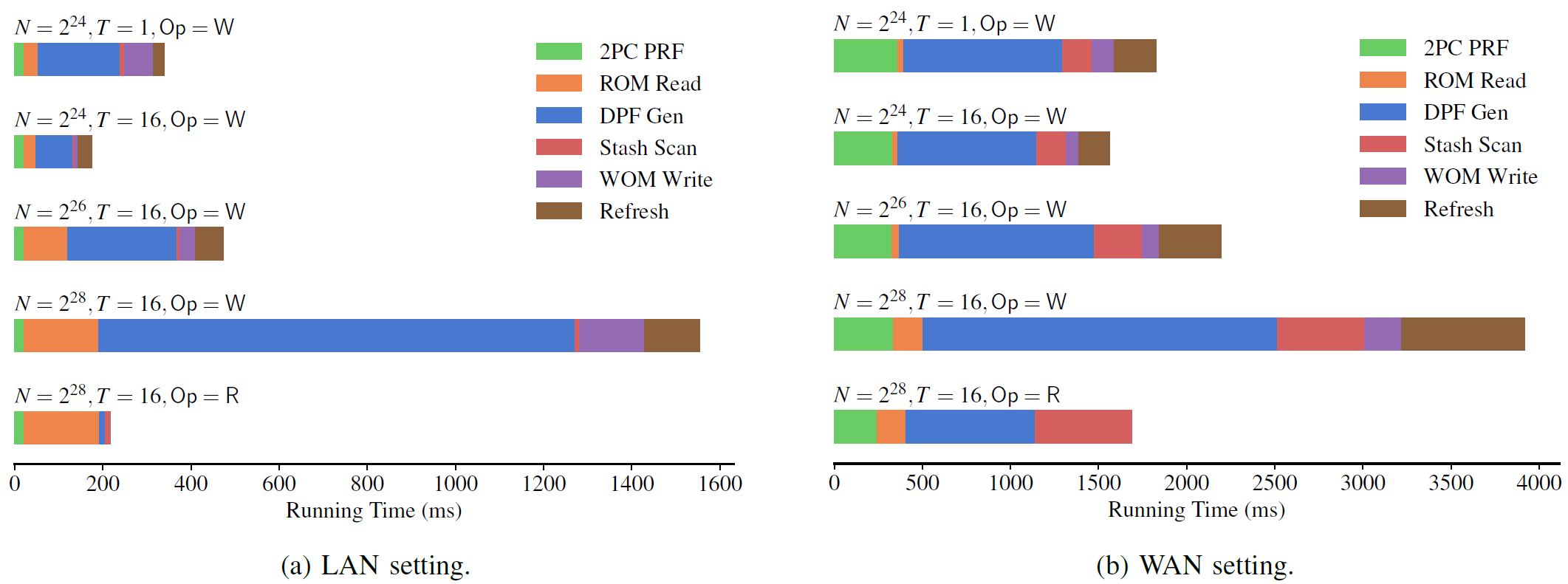
设计恶意敌手模型下关于RAM程序实际高效的安全两方计算协议是一个具有挑战性的研究目标。郁昱团队提出了主动安全的分布式点函数协议,允许至多一比特信息泄露,达到了与被动安全协议相同的效率;进一步结合双协议执行技术设计了RAM模型下主动安全的两方计算协议,全局允许至多一比特信息泄露,达到了与被动安全RAM计算协议几乎相同的效率,比之前主动安全的RAM计算协议快约100倍,从而提供了一种效率-安全权衡的实际解决方案。
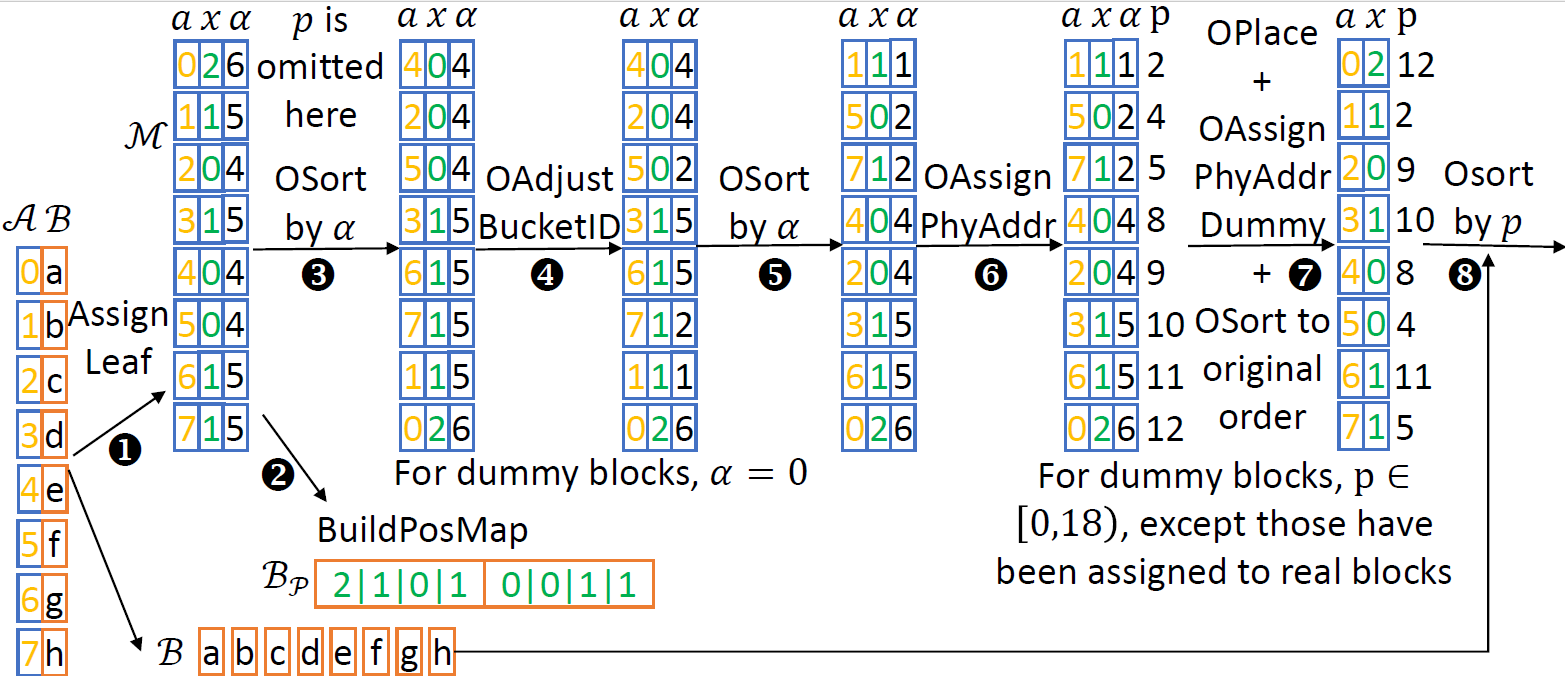
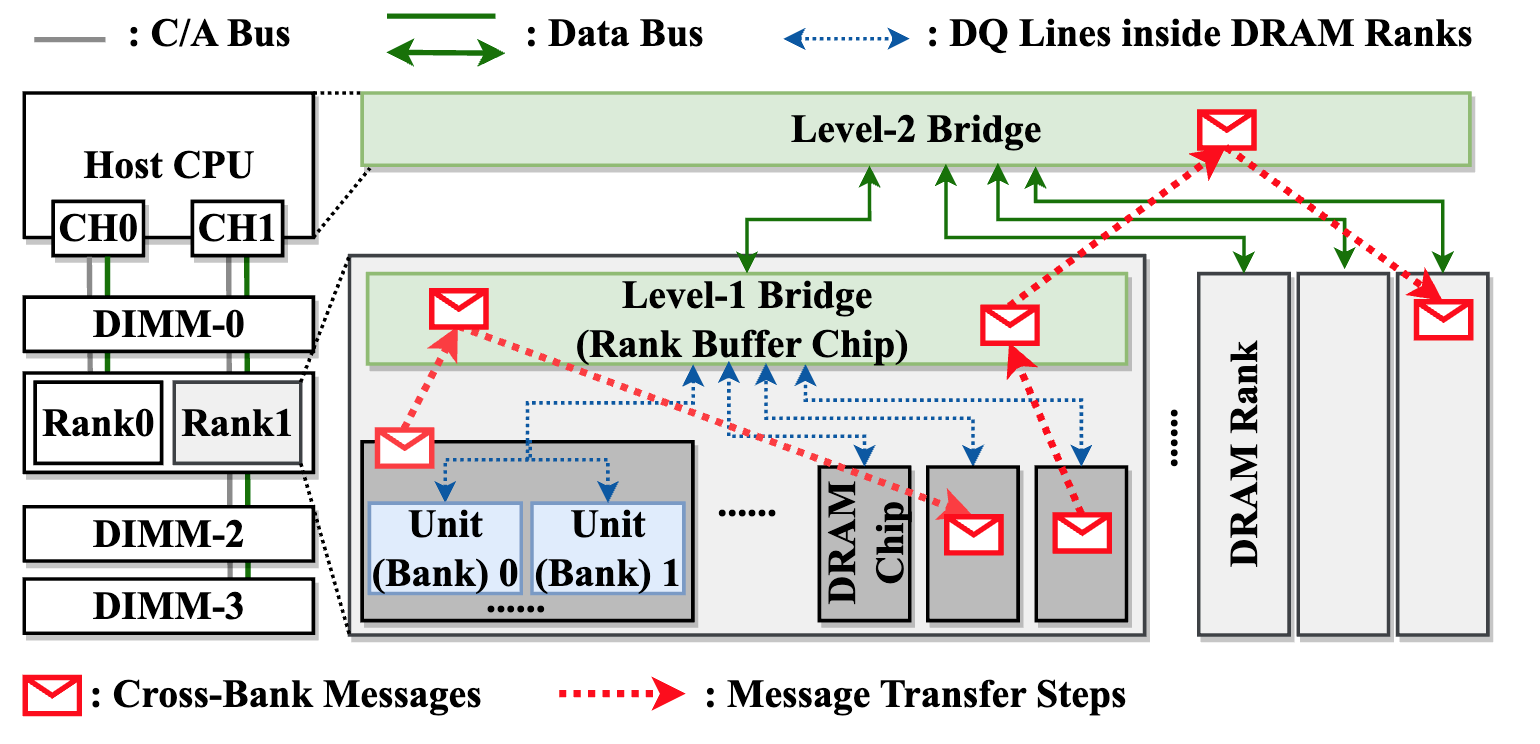
高鸣宇 成果收录于IEEE S&P 2024
高鸣宇 上海期智研究院PI、清华大学助理教授 可信执行环境的侧信道防御是一个广受关注的课题。高鸣宇团队发现对于最广泛存在的基于内存访问模式的侧信道攻击,其防御方式ORAM的初始化过程很少被研究。经过充分调研,团队发现其过程有着大量的应用场景,并提出使能ORAM的批量化加载算法Bulkor。相较于之前的工作,Bulkor在保证高安全性的情况下实现了大幅度的性能提升。该算法有助于ORAM在更多场景下的应用。




.jpg)



(3)(2)(2)(4).jpg)
(3)(2).jpg)