
陈建宇 成果收录于ICRA 2024
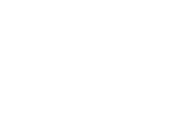
陈建宇 上海期智研究院PI、清华大学助理教授 人形机器人的全身控制是一个具有挑战性的课题。陈建宇团队提出一种去中心化的复杂机器人控制算法DEMOS,在不牺牲任务性能的前提下,鼓励机器人在强化学习过程中自主发现可以解耦合的模块,同时保留必要合作模块之间的连接。该算法为机器人的设计和开发提供了新的视角,特别是在需要高度自主性和适应性的领域,如搜索和救援、探索和工业自动化。
高阳 成果收录于ICRA 2024
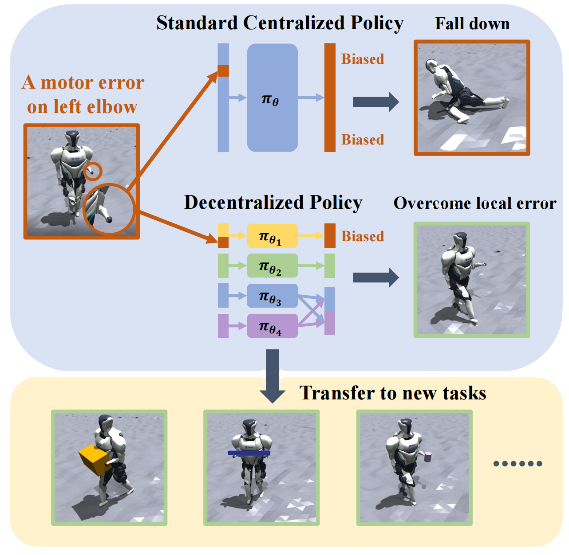
高阳 上海期智研究院PI、清华大学助理教授 高阳团队在机器人任务规划和执行领域取得重要进展,在ICRA 2024 workshop 中将展示2项重要成果—CoPa和VILA算法框架。ViLa侧重于高层任务规划,CoPa侧重低层子任务执行,两个工作都基于视觉语言模型(VLM)GPT-4V。展示了在复杂和开放世界任务中,机器人能够如何利用先进的人工智能技术来提高其自主性和适应性。
吴翼 成果收录于ICRA 2024
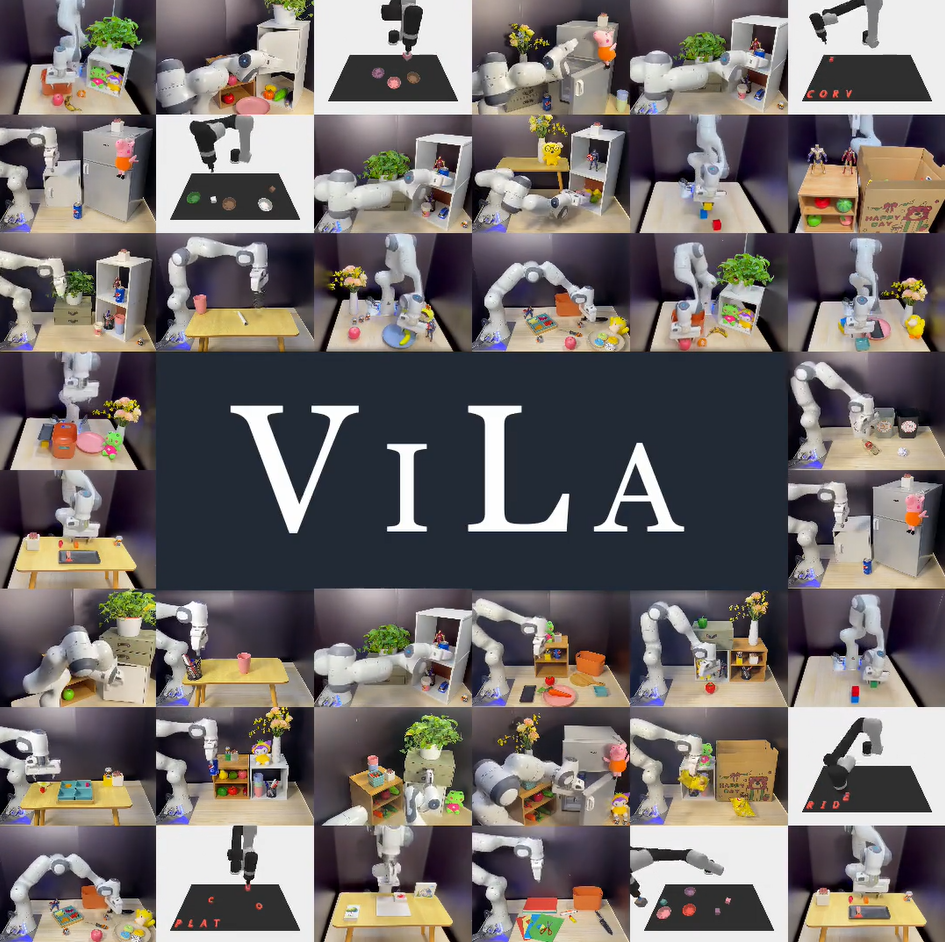
吴翼团队在四足机器人执行类人双足运动研究中取得重要进展,在ICRA 2024上发表2项成果。提出了一个分层框架,能够响应人类视频或自然语言指令,实现模仿拳击、芭蕾舞等动作,并与人类进行物理互动。提出了LAGOON系统,它使用预训练模型生成人类动作,然后通过强化学习在模拟环境中训练控制策略,以模仿生成的人类动作,并通过领域随机化将学习到的策略部署到真实世界的四足机器人上,实现了如“后空翻”、“踢球”等复杂行为。
赵行 成果收录于ICRA 2024
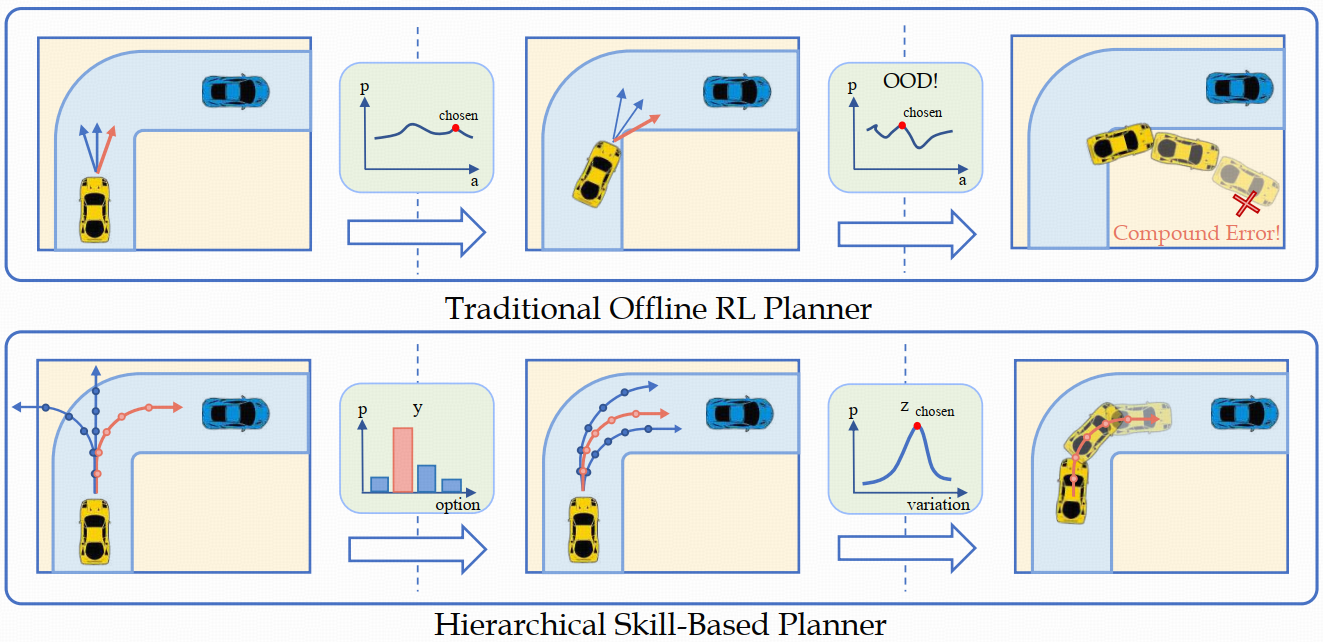
赵行团队在离线强化学习能够超越专家性能、无需危险环境交互的特性,提出了HsO-VP框架,实现了纯粹基于离线数据的长程运动规划。框架通过变分自编码器(VAE)从离线演示中学习技能,解决自动驾驶中的长期规划问题。设计了双分支序列编码器,有效应对后验坍塌问题。为自动驾驶车辆规划提供了一种新的强化学习方法。

弋力 成果收录于ICRA 2024
弋力团队在机器人视觉与触觉感知领域研究中取得重要进展,通过自监督学习和多模态数据融合来提升机器人对环境的理解和交互能力,在ICRA 2024上发表2项成果。提出了一种自监督的跨模态对比学习方法CrossVideo,通过模态内和跨模态的对比学习技术,提高点云视频理解的性能。团队提出了一种触觉增强的6D姿态跟踪系统TEG-Track,用于跟踪手中持有的未见过的物体。该方法在合成和真实世界场景中均能一致性地提升最先进的通用6D姿态跟踪器的性能。相关成果可运用推广到机器人导航、增强现实、自动化驾驶等领域。
许华哲 成果收录于ICRA 2024
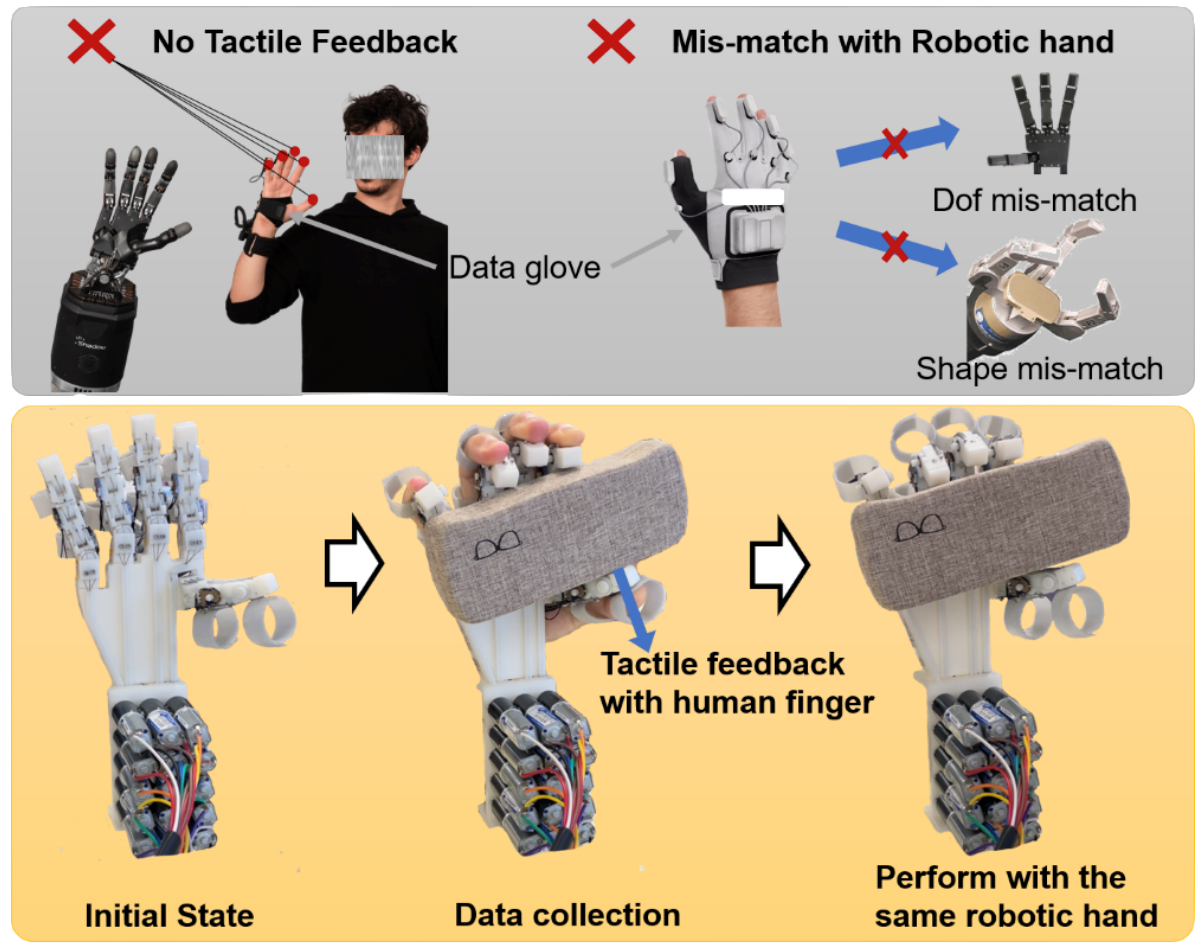
许华哲团队在机器人学习与操作研究中取得重要进展,在ICRA 2024上发表2项成果。运用强化学习算法实现通用分布式操作的系统ArrayBot,通过触觉传感器进行操作学习,可用于真实世界的多种操作任务,展示了在模拟环境训练后无需领域随机化即可迁移至真实机器人的能力。提出了一种新型的手对手模仿学习可穿戴灵巧手HIRO Hand,它结合了专家数据收集和灵巧操作的实现,使操作者能够利用自己的触觉反馈来确定适当的力量、位置和动作,以执行更复杂的任务。
高阳 成果收录于ICLR 2024
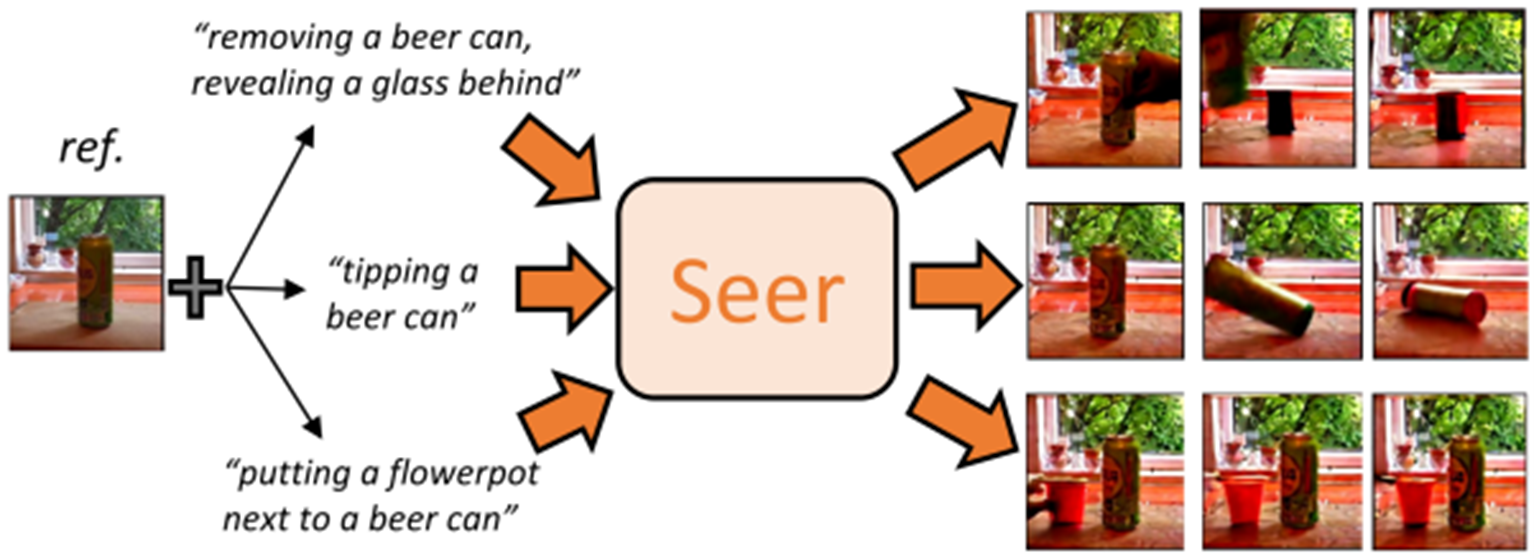
高阳团队主要围绕着模仿学习和机器人感知部分开展了一系列算法攻关研究。三项成果收录于此次ICLR会议。该团队提出了Seer视频预测算法,根据机器人感知的第一帧图像预测未来图像,完成对于所需完成任务的规划。ADS算法根据一个没有动作的演示视频,比如Seer生成的视频去进行模仿学习,为机器人从人类视频中学习铺平了道路。RelatiViT模型则解决了机器人对于物体之间相互关系之间的感知。
吴翼 成果收录于ICLR 2024
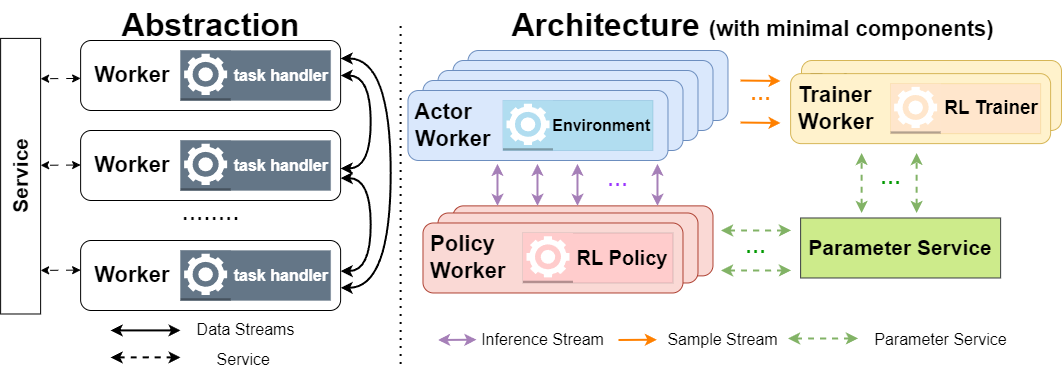
吴翼团队在强化学习训练系统抽象层面提出了创新设计方案,自主设计并开发了能够部署在一万个计算核心上进行强化学习的分布式系统SRL。通过创新的数据流抽象和高效的架构设计,在多个核心上实现了可扩展、高效和可扩展的强化学习训练,显著提高了训练吞吐量和学习性能。本系统吞吐量和样本效率能够达到最佳开源系统的21倍,达到OpenAI闭源系统的5倍。

许华哲 成果收录于ICLR 2024
许华哲团队主要围绕强化学习算法领域的数据效率和算法性能等方向,开展了一系列攻关研究,四项成果收录于此次ICLR会议,例如DrM显著提升了视觉强化学习的数据效率,COPlanner 显著提升了基于模型的强化学习的数据效率,LaMo利用预训练模型提升了离线强化学习的能力,Uni-O4则是将离线强化学习与在线强化学习连接,相关成果对自动化控制和机器人学的发展研究具有重要意义。
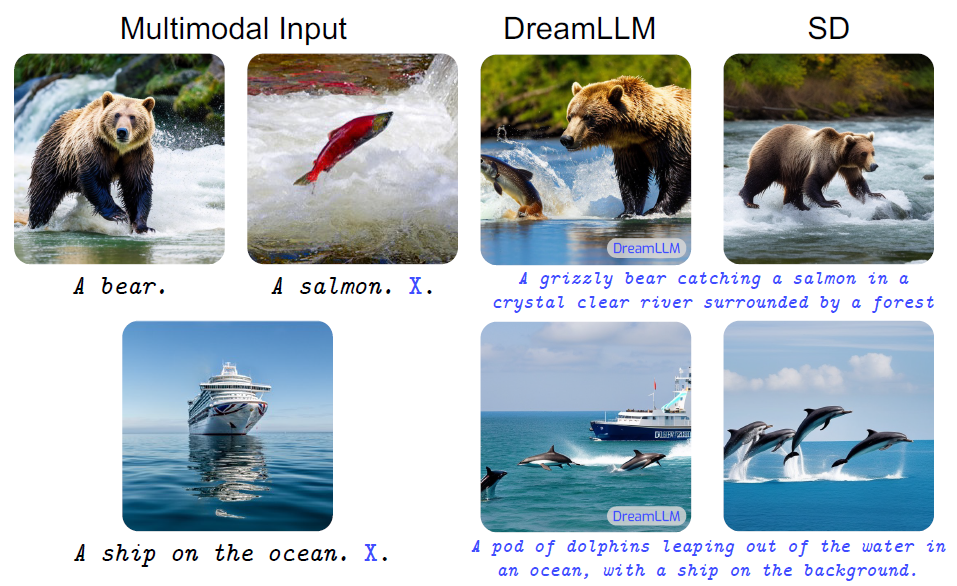
弋力 成果收录于ICLR 2024
弋力团队提出了多模态大型语言学习框架DREAMLLM和一套通用泛化的手物交互去噪算法GeneOH Diffusion
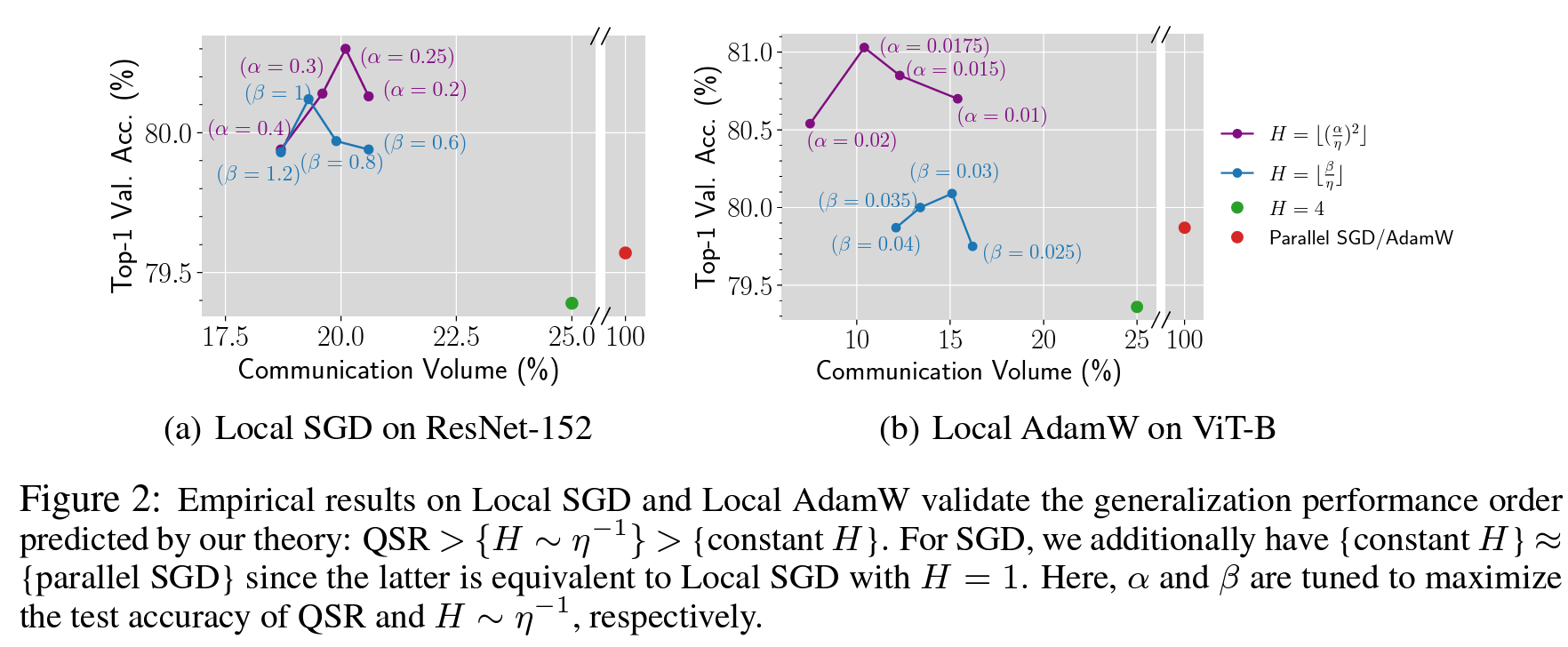
张景昭 成果收录于ICLR 2024
张景昭团队研究了分布式深度学习中的数据并行训练问题, 提出了Quadratic Synchronization Rule(QSR)的新方法,不仅考虑了通信成本和优化速度之间的权衡,而且还考虑了同步周期H对模型泛化能力的影响,在减少通信量和提高测试准确率方面的显著效果。




.jpg)


(1)-449.jpg)
-297.jpg)