(3)(1)(1)(1).jpg)
在即将举行的机器人研究领域的顶级学术会议2024 Annual Conference on Neural Information Processing Systems (NeurIPS, 12.10-
许华哲 成果收录于NeurIPS 2024
在CoRL 2024中,上海期智研究院PI、清华大学助理教授许华哲提出陈建宇团队提出一种视觉泛化强化学习框架和端到端的、近实时的三维特殊欧式群等变机器人操作模仿学习框架
弋力 成果收录于NeurIPS 2024
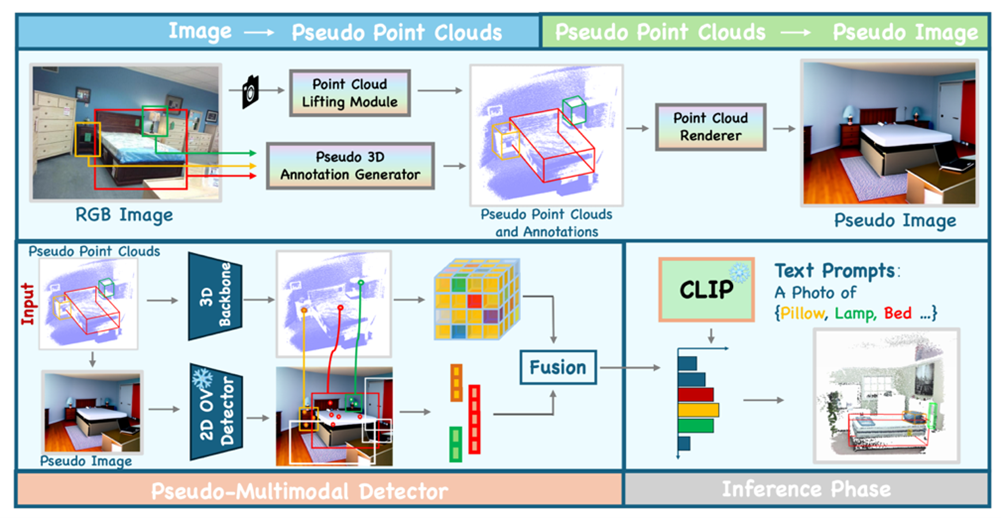
在CoRL 2024中,上海期智研究院PI、清华大学助理教授弋力提出ImOV3D方法,针对开放词汇三维目标检测中三维数据和标注稀缺的问题
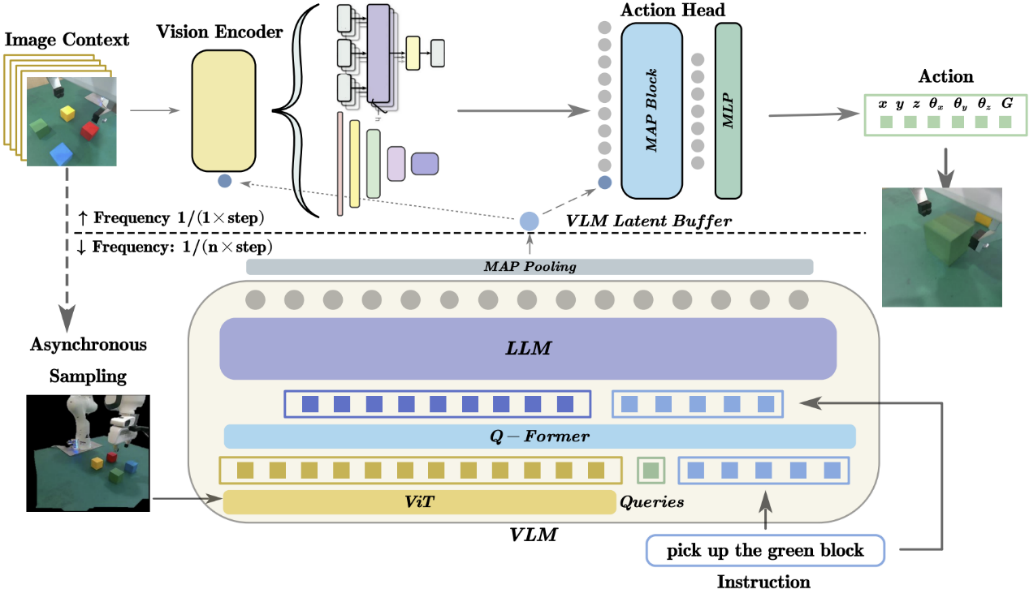
陈建宇 成果收录于NeurIPS 2024
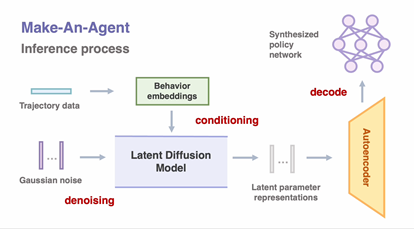
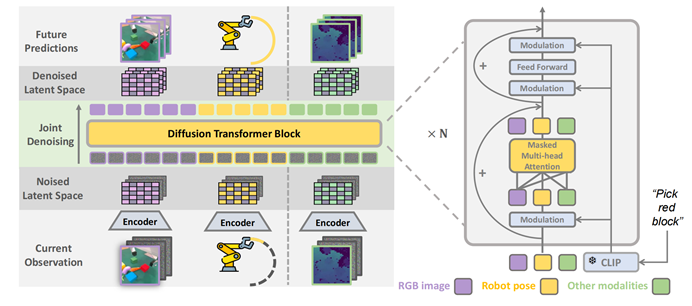
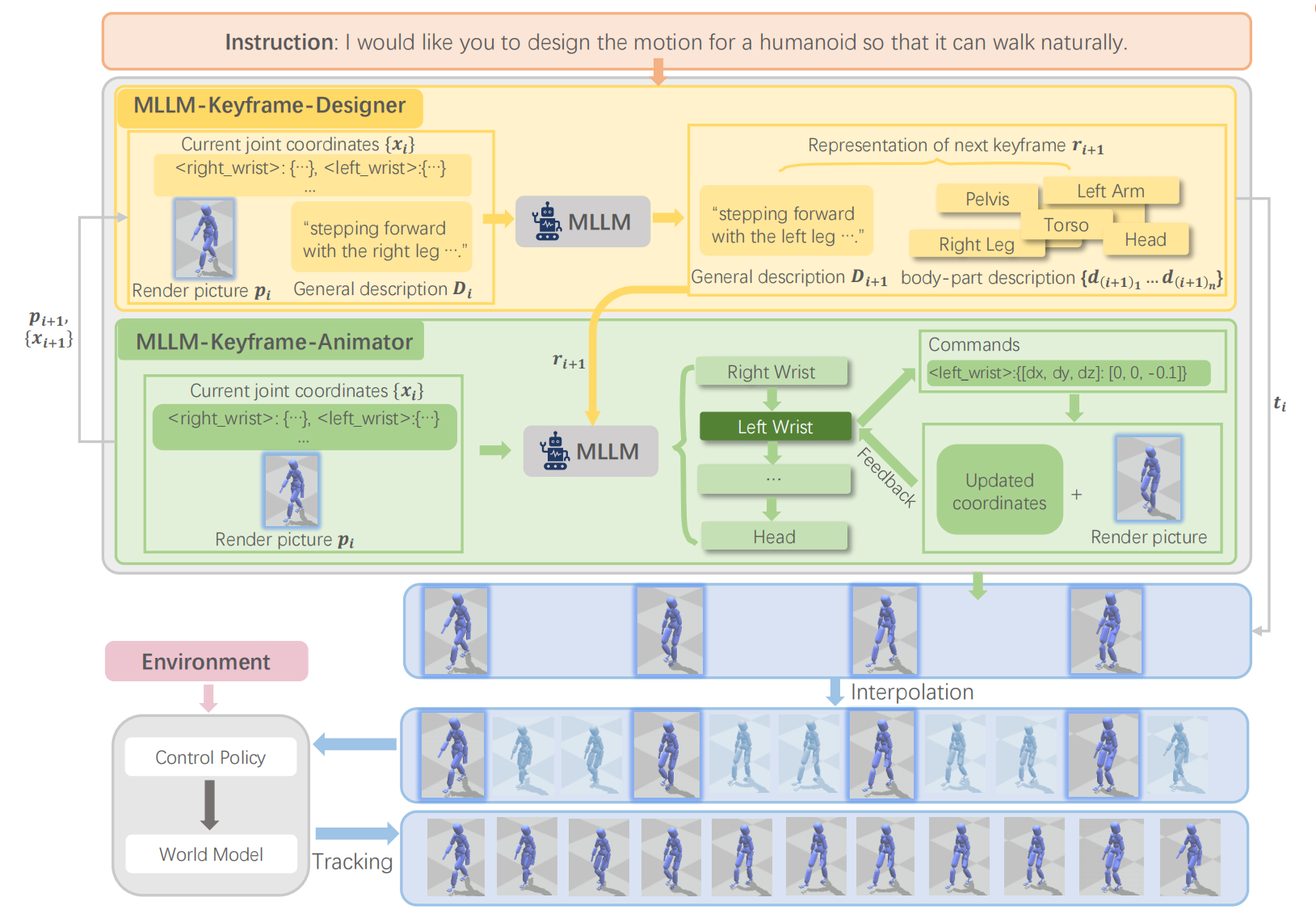
在CoRL 2024中,上海期智研究院PI、清华大学助理教授陈建宇提出提出一种新颖的机器人策略学习架构PAD
张景昭 成果收录于NeurIPS 2024
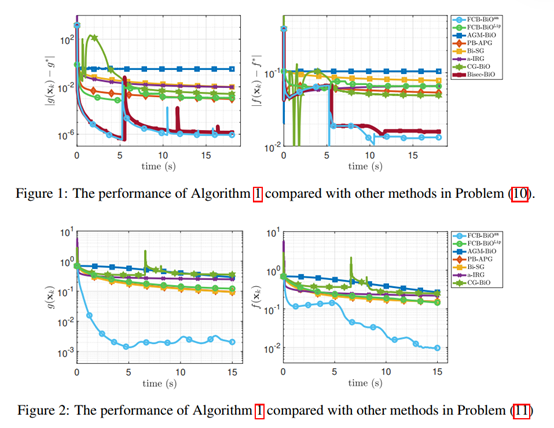
在CoRL 2024中,上海期智研究院PI、清华大学助理教授张景昭提出解决简单双层凸优化问题的近似最优一阶算法FC-BiO和一种新颖的两层在线算法
(3)(1).jpg)
在2024 Conference on Robots Learning(CoRL, 2024.11.06-09,德国-慕尼黑)中,上海期智研究院PI、清华大学助理教授赵行、高阳、陈建宇、许华哲各团队共
许华哲 成果收录于CoRL 2024
在CoRL 2024中,上海期智研究院PI、清华大学助理教授许华哲提出一种视觉泛化强化学习框架和一种端到端的、近实时的三维特殊欧式群等变机器人操作模仿学习框架
陈建宇 成果收录于CoRL 2024
在CoRL 2024中,上海期智研究院PI、清华大学助理教授陈建宇提一种新颖的机器人操作控制模型框架HiRT
高阳 成果收录于CoRL 2024
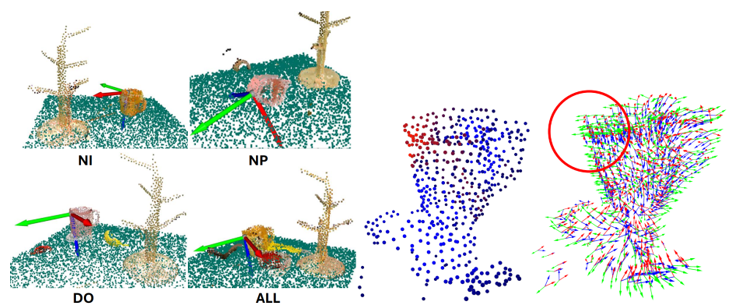
在CoRL 2024中,上海期智研究院PI、清华大学助理教授高阳团队提出“基于大模型先验知识的强化学习”框架、应用于灵巧手动态抛接物体的高效学习训练框架DexCatch、使用“通用流”(General Flow)来作为机器人学习的一种基础可供性表征 (Affordance)、“SGRv2框架”(Semantic-Geometric Representation V2)

赵行 成果收录于CoRL 2024
在CoRL 2024中,上海期智研究院PI、清华大学助理教授赵行提出人形机器人跑酷与针对随机驾驶环境的不确定性导向决策Transformer
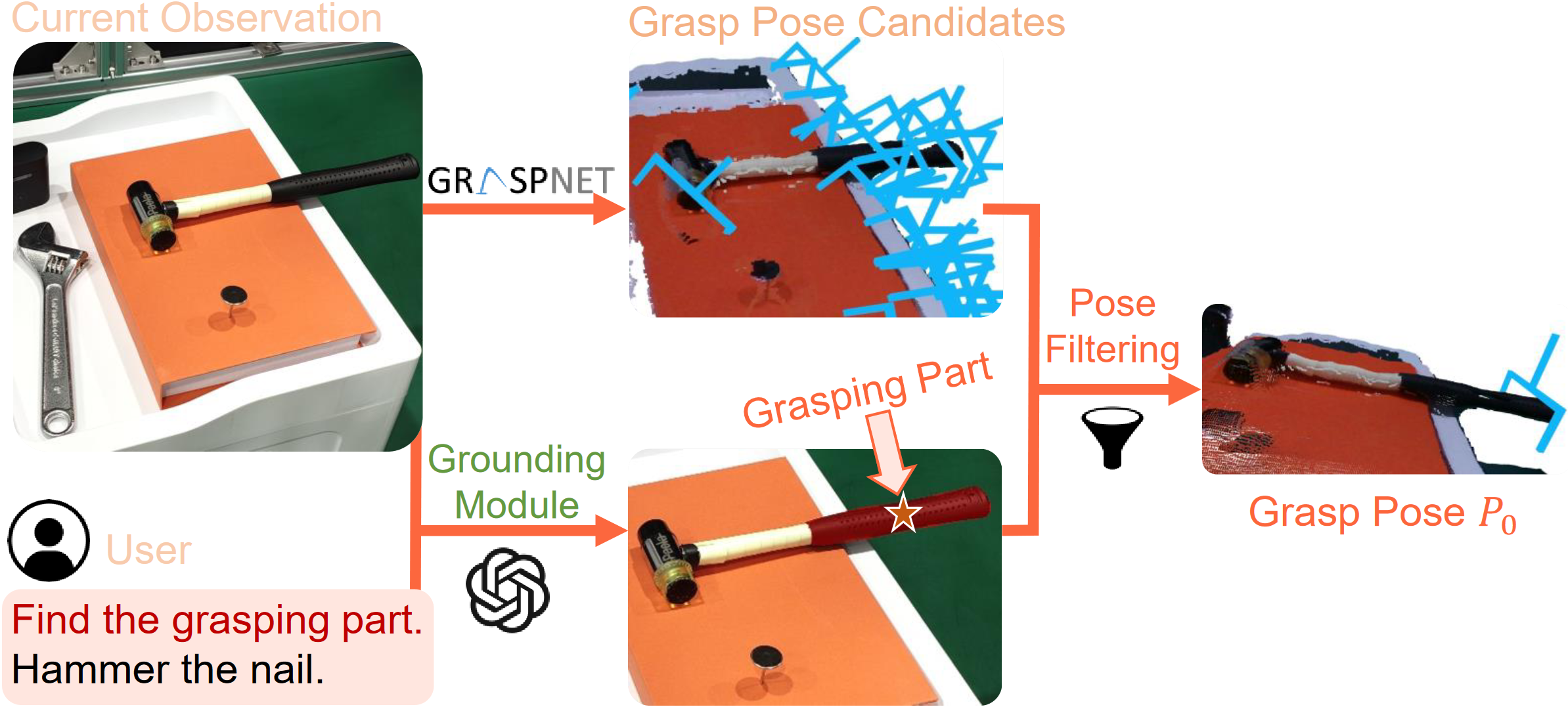
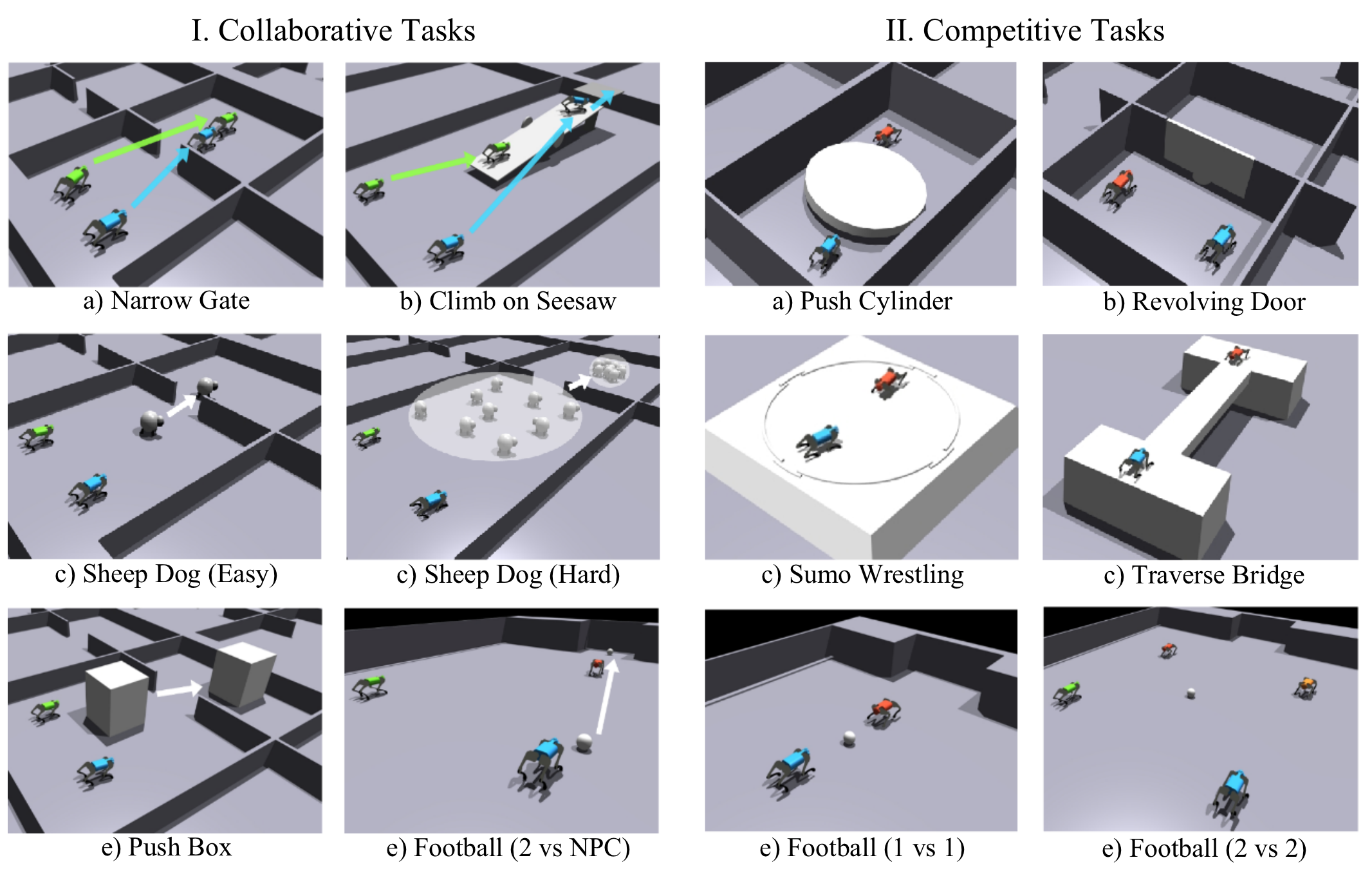
高阳 成果收录于IROS 2024
高阳团队提出CoPa框架,利用基础模型内嵌的常识知识,通过空间约束实现机器人的通用操控能力、“多智能体机械狗环境”,来促进机械狗在复杂环境中的协作能力,成功地使机械狗能够在可并行模拟的环境里与子环境中的其他机械狗,物体以及自行驱动的智能体交互。
陈建宇 成果收录于IROS 2024
在IROS 2024中,陈建宇团队发表两项成果,提出一种新颖的DoReMi机器人规划决策框架和一款新型双腿轮足机器人Whleaper
吴翼 成果收录于IROS 2024
在IROS 2024中,吴翼团队机器人能够快速自我生成有效的训练数据的RST框架,使机器人能够自我生成有效的训练数据,而非依赖人类专家示范,以此来解决收集足够的机器人轨迹数据十分昂贵的问题。
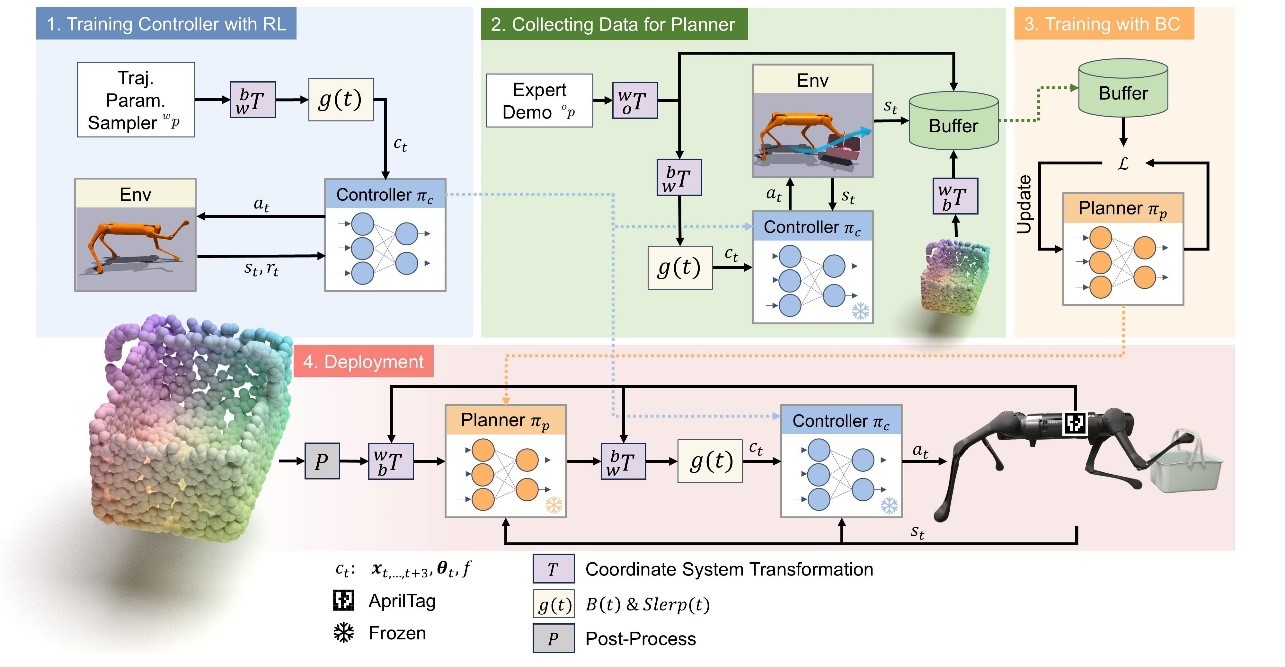
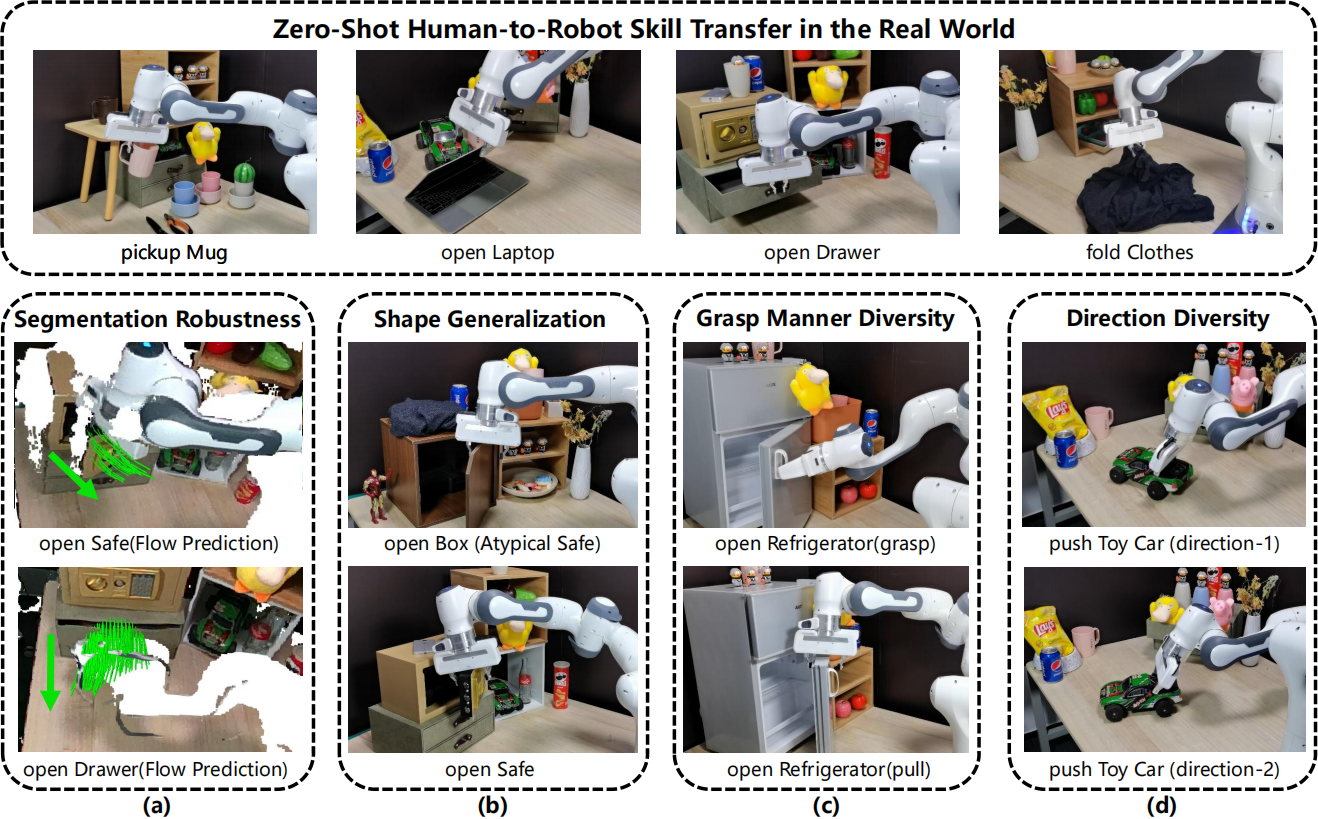
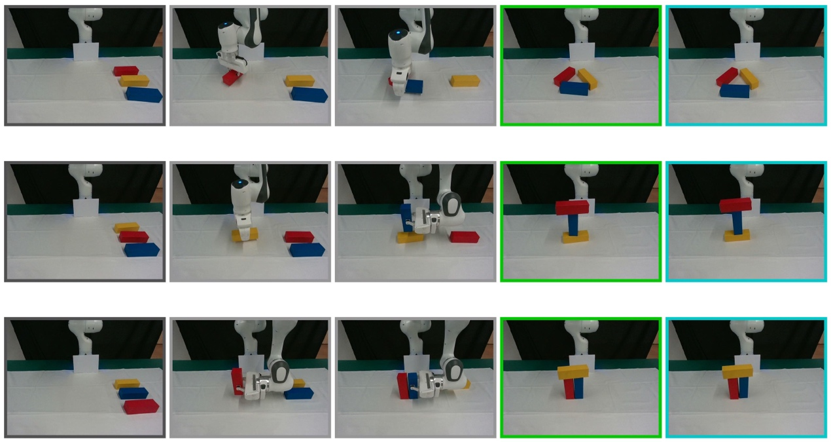
许华哲 成果收录于IROS 2024
在IROS 2024中,许华哲团队提出了一种结合行为克隆与强化学习的分层学习框架,旨在让四足机器人实现多种日常操控任务,如提篮子、按按钮、开关门等。
(3).jpg)
在2024 European Conference on Computer Vision (ECCV, 9.29-10.04,意大利-米兰) 中,上海期智研究院PI弋力、赵行、许华哲各团队共计发布7项
弋力 成果收录于ECCV 2024
在计算机视觉领域的顶级学术会议2024 European Conference on Computer Vision (ECCV, 9.29-10.04,意大利-米兰) 中,上海期智研究院PI弋力、赵行、许华哲各团队共计发布7项最新科研成果 (录用率~ 18%)。近期将陆续发布ECCV专题学术成果分享。
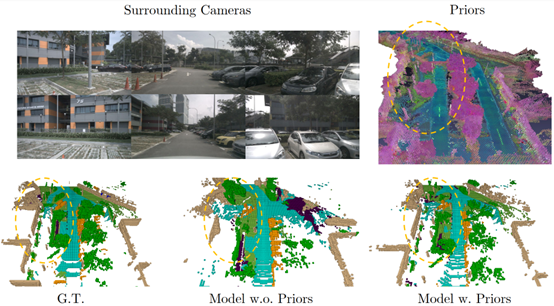
赵行 成果收录于ECCV 2024
上海期智研究院PI、清华大学助理教授赵行团队,设计了新的感知框架PreSight,使用过去观测信息重建可泛化的城市级先验,为解决自动驾驶在线感知难的问题提供了新的思路。此外,团队利用时序信息在三维空间中构建匹配代价的占据栅格预测方法,显著提升模型的空间理解能力。相关2项成果收录在今年的计算机视觉领域的顶级学术会议之一ECCV 2024。
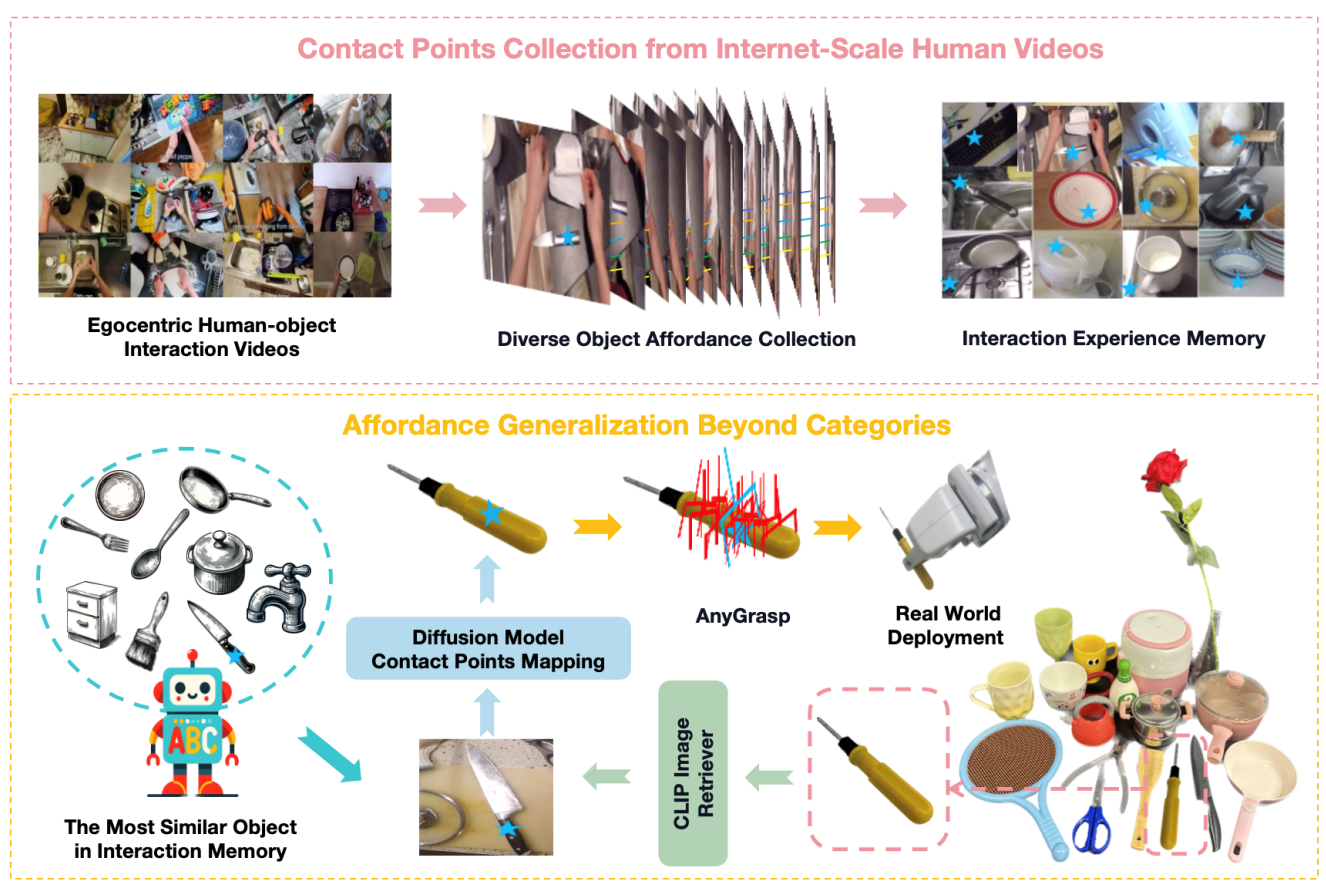
许华哲 成果收录于ECCV 2024
上海期智研究院PI、清华大学助理教授许华哲团队,提出了一种新的机器人操控框架Robo-ABC,使机器人能够泛化地理解和操作在训练时未见过的类别的物体。此外,团队利用视频扩散模型的生成能力,提出了一种从专家视频中提取密集奖励信号的新框架。相关2项成果收录在今年的计算机视觉领域的顶级学术会议之一ECCV 2024。




.jpg)


(3)-935.jpg)
(2)(1)(1).jpg)